Aibo ERS-2xx series
The Aibos run a special operating system developed by Sony, called Aperios. Sony has released a software development kit, the OPEN-R SDK (written in C++). The development environment uses a slightly patched version of the 3.3 GCC compiler, and can be run on any UNIX based platform, including Mac OS X and cygwin under Windows. See the setup page for more information.
For development, you will need either an ERS-210, ERS-220, or ERS-7 model. You will need the wireless card accessory for the 210 or 220 models to get data in and out of the robot. (Integrated standard on the ERS-7.)
The down side is that Sony no longer produces the Aibo (and has disbanded their entire robotics R&D effort), so you will have to acquire an Aibo from a second-hand source. Tekkotsu support may also diminish in future releases.
 Specifications
Specifications
- 384 MHz MIPS processor (Supercore) or 192 MHz MIPS (non-supercore)
- 32 MB RAM
- 802.11b wireless ethernet (add-on)
- MemoryStick reader/writer
- 18 PID joints, each with force sensing
- 4 legs
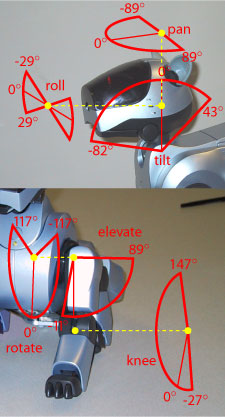
- 3 joints each (elevate, rotate, knee)
- 1 paw button
- 3 joints on neck (tilt, pan, roll)
- 2 joints on tail (tilt, pan)
- 1 joint on mouth
- 4 legs
- 2 ears, 1 boolean joint each (flick up or down)
- 9 LEDs
- 7 on faceplate
- 2 on tail
- Video camera
- Field of view 57.6° wide and 47.8° high
- Resolutions: 352x288, 176x144, 88x72, 44x36 pixels.
- Up to 25 frames per second
- Stereo microphones
- IR distance measure, aligned with center of camera
- X, Y, and Z accelerometers
- 2 pressure sensitive buttons on head
- 1 boolean button under mouth
- 1 boolean button on back
- Sensor updates are sent every 32ms, with 4 samples per update.
Usage
Diagrams
These diagrams are pulled from Sony's documentation for the models. Numbers in italics were measured from the diagrams, whereas non-italic numbers were obtained from the model documentation.
At first glance, the reference frames may seem somewhat haphazard, but are determined by the Denavit-Hartenberg method of computing kinematic parameters. The z axis of each link is determined by the axis of rotation for revolute joints, or the direction of extension for prismatic joints (which is used for the IR sensors and camera) The x axis is then determined (sometimes with remaining freedom) by the relationship between consecutive links, and the y axis is then uniquely determined by the x and z axes.
The reference frame of the camera is made to concur with the reference frame used by the vision system, where positive x is to the AIBO's right, positive y is down, and positive z extends into the scene.
ERS-210
 |
 |
 |
|
Head Blowup
.gif / .pdf (176KB)
|
Leg Interest Points
.gif / .pdf (396KB)
|
Leg Reference Frames
.gif / .pdf (348KB)
|
ERS-220
 |
 |
 |
|
Head Blowup
.gif / .pdf (164KB)
|
Leg Interest Points
.gif / .pdf (596KB)
|
Leg Reference Frames
.gif / .pdf (552KB)
|
When using the interest point diagrams, first find the letter of the point you would like to reference, then look at the corresponding name pattern shown in the list. Most interest points are replicated on each of the limbs, so you will need to determine which limb you desire as well as whether you want the inner surface (closer to the body) or the outer surface (facing away from the body).
In the tables of distances in each diagram, italicized values were obtained from measurements, whereas the rest were obtained directly from documentation specifications.