Videos and Screenshots
Our more recent videos have been uploaded to YouTube.
![]()
Visit the TekkotsuRobotics channel to see what’s new!
Older Videos
Regis Prototype
Video of our “Regis” prototype running a demonstration we showed at AAAI-07 in Vancouver. For more information, see the Regis page.

MPEG-4 High-res (.mp4, 12.7MB)
MPEG-4 Low-res (.mp4, 7.5MB)
YouTube (Flash)
MPEG-4 High-res (.mp4, 12.7MB)
MPEG-4 Low-res (.mp4, 7.5MB)
YouTube (Flash)
AiboCam Videos
Generated by streaming video over a wireless connection to a PC, where
the individual frames are saved to disk and then compressed into video
format.
 Raw: 625
KB, 16 seconds (40 KB/s)
Raw: 625
KB, 16 seconds (40 KB/s)
- MPEG-4 (.mp4)
- Quicktime (.mov)
- AVI (.avi)
(shot on a Sony Aibo ERS-210A)
 Segmented: 1.2 MB, 16 seconds (81 KB/s)
Segmented: 1.2 MB, 16 seconds (81 KB/s)
- MPEG-4 (.mp4)
- Quicktime (.mov)
- AVI (.avi)
(shot on a Sony Aibo ERS-210A)
Raw: 625
KB, 16 seconds (40 KB/s)- MPEG-4 (.mp4)
- Quicktime (.mov)
- AVI (.avi)
(shot on a Sony Aibo ERS-210A)
Segmented: 1.2 MB, 16 seconds (81 KB/s)- MPEG-4 (.mp4)
- Quicktime (.mov)
- AVI (.avi)
(shot on a Sony Aibo ERS-210A)
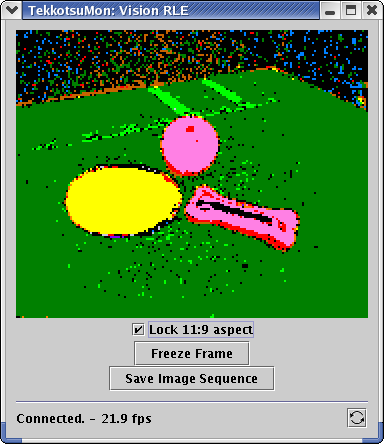
- High quality compression was used for the segmented video to retain its crisp edges.
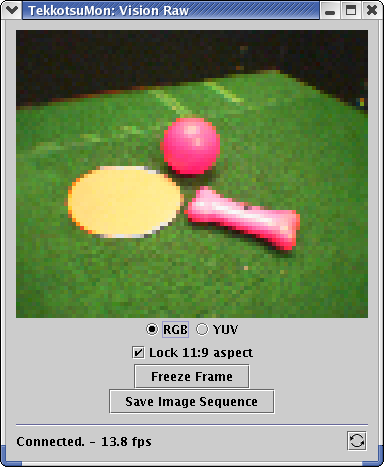
- Segmented video is full resolution of what the Aibo is processing. Raw video is half resolution of what the Aibo is "seeing".
- See the screenshots for the Raw GUI and Segmented GUI that produced these files.
- Other available GUI tools are listed on the TekkotsuMon Tutorial page.
{kind=link}
k-Armed Bandit (where k=2)
The Aibo plays on a laptop simulating a gambling machine. This utilizes
state machine, force feedback, and vision:
 4.3 MB,
70 seconds
4.3 MB,
70 seconds
- MPEG-4 (.mp4)
- Quicktime (.mov)
- AVI (.avi)
(shot on a Minolta DiMage 7i, edited in iMovie)
4.3 MB,
70 seconds- MPEG-4 (.mp4)
- Quicktime (.mov)
- AVI (.avi)
(shot on a Minolta DiMage 7i, edited in iMovie)
Walking
Showcases the walking abilities included with the
framework. The walking algorithms are ported from CMU's
RoboSoccer
team. The low walking style is both fast and allows the ball to
be
dribbled. It also lowers the center of gravity, which makes it
harder to knock over. Notice how the gait transitions smoothly,
without stumbling. However, it is optimized for level, even
terrain, and may not perform as well elsewhere.
 5.4 MB,
90 seconds
5.4 MB,
90 seconds
- MPEG-4 (.mp4)
- Quicktime (.mov)
- AVI (.avi)
(shot on a Minolta DiMage 7i, edited in iMovie)
 3.1 MB,
51 seconds
3.1 MB,
51 seconds
- MPEG-4 (.mp4)
- Quicktime (.mov)
- AVI (.avi)
(shot on a Minolta DiMage 7i, edited in iMovie)
5.4 MB,
90 seconds- MPEG-4 (.mp4)
- Quicktime (.mov)
- AVI (.avi)
(shot on a Minolta DiMage 7i, edited in iMovie)
3.1 MB,
51 seconds- MPEG-4 (.mp4)
- Quicktime (.mov)
- AVI (.avi)
(shot on a Minolta DiMage 7i, edited in iMovie)
Maze Exploration
A project by one of the Pennsylvania Governor's School
for the Sciences 2004 team projects, this video shows the AIBO
centering between walls, aligning to the walls, and exploring a
maze. Final report is available, The
Sony AIBO: Using IR for Maze
Navigation, by Kyle Lawton and Elizabeth Shrecengost, advised by
Ethan Tira-Thompson and Zhan Shi.
 3.8 MB,
62 seconds
3.8 MB,
62 seconds
- MPEG-4 (.mp4)
- Quicktime (.mov)
- AVI (.avi)
(shot on a Canon S410)
3.8 MB,
62 seconds- MPEG-4 (.mp4)
- Quicktime (.mov)
- AVI (.avi)
(shot on a Canon S410)
- Major sources used (not included in releases, available
from CVS contrib
directory)
Head Leveler Demo
Uses the Aibo's accelerometers to keep the head in a
constant orientation, regardless of the angle the body. Pressing
the head buttons releases the neck joints and allows the head to be
positioned where it should be held.
 2.5 MB,
41 seconds
2.5 MB,
41 seconds
- MPEG-4 (.mp4)
- Quicktime (.mov)
- AVI (.avi)
(shot on a Minolta DiMage 7i)
2.5 MB,
41 seconds- MPEG-4 (.mp4)
- Quicktime (.mov)
- AVI (.avi)
(shot on a Minolta DiMage 7i)
- Major objects used:
- HeadLevelBehavior (source: .h)
- HeadPointerMC (source: .h/.cc)
Software-Based Camera Stabilization
Using Y-channel (intensity) images streamed over wireless
and recorded on a PC. Post processing in MATLAB allows rapid test
and development of vision algorithms. In this case, we try to
stabilize the camera in software by registering each new image to the
one before it. Unfortunately, the computational cost of this
example appears to be too high to actually implement on the AIBO
itself. (Might be possible, but difficult) The current walking
target velocity is also logged and used to predict
"intentional" rotational displacement between images.
 3.2 MB,
43 seconds
3.2 MB,
43 seconds
- MPEG-4 (.mp4)
- Quicktime (.mov)
(shot on a Sony Aibo ERS-210A)
 82
seconds
82
seconds
- MPEG-4 (.mp4, 6.2 MB)
- Quicktime (.mov, 5.2 MB)
(shot on a Sony Aibo ERS-210A)
3.2 MB,
43 seconds- MPEG-4 (.mp4)
- Quicktime (.mov)
(shot on a Sony Aibo ERS-210A)
82
seconds- MPEG-4 (.mp4, 6.2 MB)
- Quicktime (.mov, 5.2 MB)
(shot on a Sony Aibo ERS-210A)
- Class presentation is here (PDF) and here (PPT)
- Code is available from here (.tgz)
Emergency Stop Demo
Demonstrates the default startup mode. A simple
double-tap on the back button at any time will enable or disable this
mode. The tail light pulses blue/red to signal this mode, and the
joints remain pliable, for both safety and allowing the robot to be
posed manually.
This example shows the ERS-210, but the ERS-220 and ERS-7 all use unique LEDs, so they have different signaling patterns.
 2.5 MB,
41 seconds
2.5 MB,
41 seconds
- MPEG-4 (.mp4)
- Quicktime (.mov)
- AVI (.avi)
(shot on a Minolta DiMage 7i, edited in iMovie)
This example shows the ERS-210, but the ERS-220 and ERS-7 all use unique LEDs, so they have different signaling patterns.
2.5 MB,
41 seconds- MPEG-4 (.mp4)
- Quicktime (.mov)
- AVI (.avi)
(shot on a Minolta DiMage 7i, edited in iMovie)
- Major objects used:
- EmergencyStopMC (source: .h/.cc)
TD-learning XOR:
The Aibo learns that a single ball predicts reward, but
both balls predict no reward. This uses our internal AI module
(under development), object recognition, and (simple) gesture
recognition.
 4.0 MB,
65 seconds
4.0 MB,
65 seconds
- MPEG-4 (.mp4)
- Quicktime (.mov)
- AVI (.avi)
(shot on a DV camera, edited in iMovie)
The paper that describes the research aspects of this demo can be found here.
4.0 MB,
65 seconds- MPEG-4 (.mp4)
- Quicktime (.mov)
- AVI (.avi)
(shot on a DV camera, edited in iMovie)
The paper that describes the research aspects of this demo can be found here.
Screenshots
The following screenshots are from
the Java and MATLAB tools which are bundled with Tekkotsu. Click
on a name to get a description of the tool, or click on the thumbnail
for a larger image.
Notice these screenshots are taken on a variety of platforms.
Notice these screenshots are taken on a variety of platforms.
Java Tools
 ControllerGUI |
 VisionGUI |
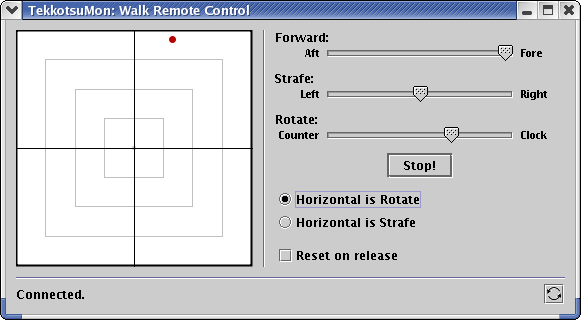 Walk Remote Control |
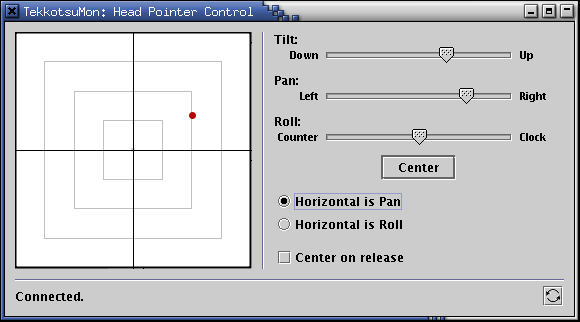 Head Pointer |
 Aibo3D |
 EStopGUI |
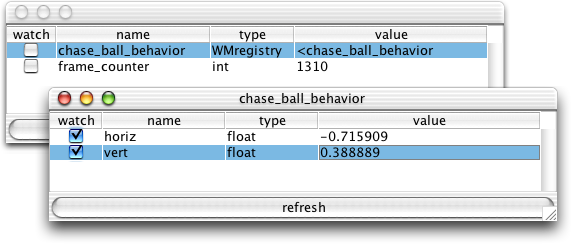 Watchable Memory |
|
MATLAB Tools
NOTE: The MATLAB tools are currently broken in version 1.5. There is a work around: copy all of the *Listener.java files from tools/mon/org/tekkotsu/mon/ to tools/mon (with the MATLAB .m files) Launcher |
 MATLAB Vision Monitor |
 Walk Remote Control |
 Joint History Graph |