Getting Started
Tekkotsu at a Glance
The Controller GUI panel shown below is the main interface for controlling a robot from the PC. Similar capabilities are available from the console (telnet to port 10001 on the robot) if you do not wish to use a Java-based GUI interface.

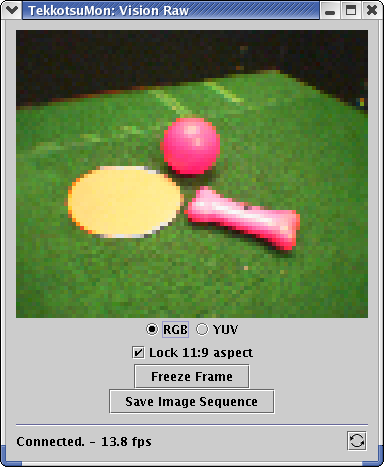
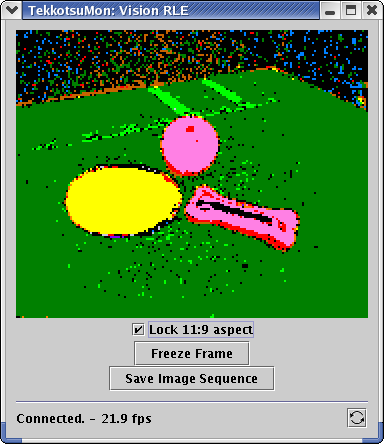
You can stream video from the robot in real time with RawCam and monitor the performance of the color segmentation with SegCam, both of which are launched from the ControllerGUI. You can also record these streams to image sequences on the desktop for later processing. The RawCam window also lets you select what color space to view. Compression, resolution, and channel options may be modified. The low-level network protocol code for all services are separated from the GUI implementation into independent classes to enable easy reuse for other applications, such as GUI mashups or off-board processing.
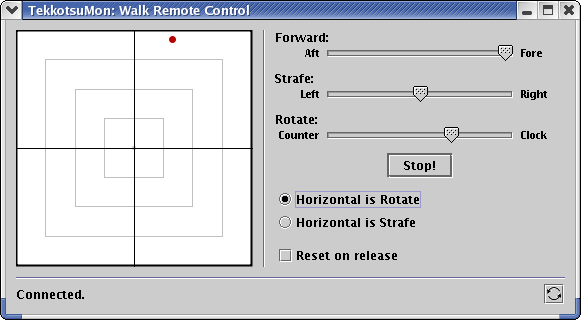
Using the Walk Remote Control interface, the AIBO may be driven around. Combined with the vision monitors, this is everything you need for basic telepresence.
Check out our demo videos and screenshots to see Tekkotsu in action.
To learn more about the Tekkotsu framework, read the Architectural Overview.
To learn more about the user interface, read the TekkotsuMon Tutorial.
If you want to see some sample code, check Dr. Touretzky's tutorial.
Setting Up a Tekkotsu Robotics Education Lab
First, you will need some robots. You can check the Robots and Hardware page to find what is available. We particularly recommend one of the Chiara, HandEye, or Create based systems.
Second, you will need some laboratory space. We recommend constructing a playpen for the robots to run around in, which protects them from being stepped on, falling off ledges, or other environmental damage. A well designed environment can also simply perception problems when necessary.
You will also need a computer (Windows, Mac, or Linux) with 802.11b wireless ethernet capability. We recommend getting a dedicated wireless access point (WAP) to communicate with the robots, and then using wired connection between the computer and the WAP. This is to avoid having the WAP retransmit data between the robot and the computer, which causes data collisions and poor network performance. You will also want to assign the robots static IP addresses (or better yet, reserved addresses via the DHCP server) so they will have consistent accessiblity.
Peer to peer mode, where the computer uses it's own built-in wireless to directly communicates with the robot, is another choice, but this can be troublesome when multiple Aibos are in use, and usually has lower bandwidth than using a dedicated WAP with a wired connection to the computer.
Learning to use Tekkotsu
Beginner's tutorial (html)
Author: David S. Touretzky, Carnegie Mellon University
More tutorials are available in the Developer's Resources section.