SharedGlobals.h File Reference
A class to hold various simulator parameters which need to be accessed from multiple processes. More...
#include "IPC/MutexLock.h"#include "IPC/SemaphoreManager.h"#include "IPC/ProcessID.h"#include "Shared/plist.h"#include "Shared/TimeET.h"#include "Shared/RobotInfo.h"#include "local/DataSource.h"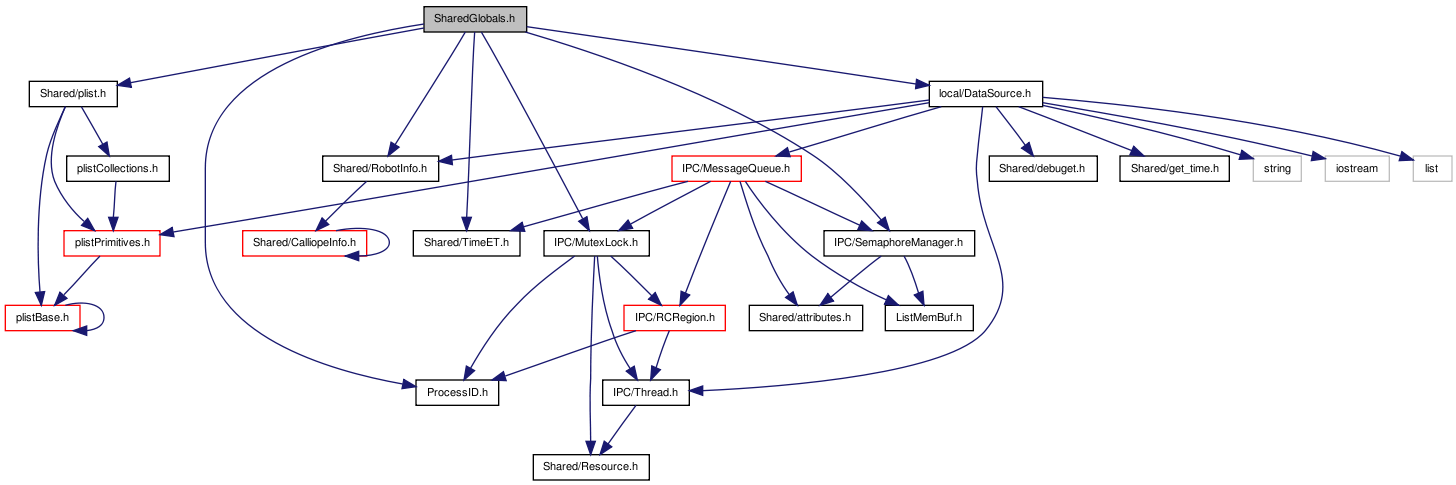
Go to the source code of this file.
Classes | |
| class | SharedGlobals |
| A class to hold various simulator parameters which need to be accessed from multiple processes. More... | |
| class | MotionSimConfig |
| holds configuration parameters for the motion process More... | |
| class | StreamSimConfig |
Typedefs | |
| typedef RegionRegistry < MAX_SUBJECTS, MAX_SUBJECT_NAME > | ipc_setup_t |
| the type to use for the inter-process communication registry | |
Functions | |
| float | getTimeScale () |
| a prototype for accessing current time scale without referencing globals directly | |
Variables | |
| const unsigned int | MAX_SUBJECTS = 50 |
| maximum number of message queues the simulator can maintain | |
| const unsigned int | MAX_SUBJECT_NAME = 50 |
| maximum storage capacity of subject names | |
| ipc_setup_t * | ipc_setup |
| a global pointer to the inter-process message queue registry (a RegionRegistry) | |
| SharedGlobals * | globals |
| a global pointer to the SharedGlobals instance | |
Detailed Description
A class to hold various simulator parameters which need to be accessed from multiple processes.
Definition in file SharedGlobals.h.
Typedef Documentation
the type to use for the inter-process communication registry
Definition at line 278 of file SharedGlobals.h.
Function Documentation
| float getTimeScale | ( | ) |
a prototype for accessing current time scale without referencing globals directly
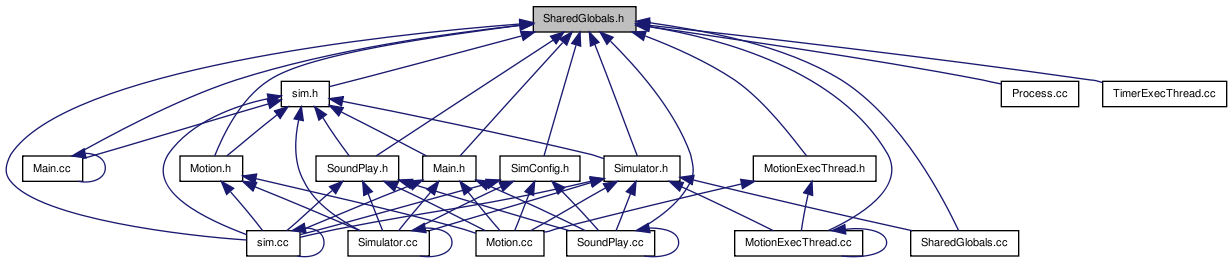
Referenced by DataStreamDriver::advance(), DataStreamDriver::connect(), SSC32Driver::motionCheck(), CreateDriver::motionCheck(), SSC32Driver::plistValueChanged(), DynamixelDriver::plistValueChanged(), CreateDriver::plistValueChanged(), FileSystemDataSource::resetPoller(), DataThread::run(), DataStreamDriver::run(), DataSource::setFrozen(), and CommThread::updateCommands().
Variable Documentation
a global pointer to the SharedGlobals instance
Definition at line 16 of file SharedGlobals.cc.
Referenced by MotionExecThread::applyPostureFeedback(), sim::badExitCleanup(), TimerExecThread::calcSleepTime(), SyncDataThread::cancelled(), Simulator::cmdAdvance(), Simulator::cmdPause(), Simulator::cmdQuit(), Simulator::cmdRun(), Simulator::cmdRunlevel(), Simulator::cmdStatus(), Simulator::cmdStep(), Motion::doStart(), Main::doStart(), Motion::doStop(), FrameCounter::filterSendRequest(), sim::fork_process(), Simulator::getNextFrame(), Main::gotCamera(), Main::gotEvent(), Main::gotSensors(), Main::gotThreadedEvent(), Main::gotTimer(), Motion::gotWakeup(), Simulator::incrementTime(), SyncDataThread::interrupted(), MotionExecThread::interrupted(), TimerExecThread::launched(), SyncDataThread::launched(), MotionExecThread::launched(), sim::manage_process(), Simulator::messagesRead(), Simulator::nextSensorTime(), Simulator::plistCollectionEntriesChanged(), Simulator::plistCollectionEntryAdded(), Simulator::plistCollectionEntryRemoved(), Simulator::plistValueChanged(), TimerExecThread::poll(), MotionExecThread::poll(), Process::Process(), Main::processEvent(), Simulator::processRunlevel(), TimerExecThread::reset(), MotionExecThread::reset(), Simulator::resetSpeedMode(), Simulator::run(), sim::run(), Process::run(), Motion::run(), Main::run(), Simulator::sendSensor(), Simulator::setMotionEnteringRealtime(), Simulator::setMotionLeavingRealtime(), sim::sim(), sim::sim_get_time(), sim::sim_getTimeScale(), Simulator::Simulator(), Process::statusReport(), Simulator::updateDataSources(), sim::wait_runlevel(), sim::~sim(), and Simulator::~Simulator().
a global pointer to the inter-process message queue registry (a RegionRegistry)
Definition at line 15 of file SharedGlobals.cc.
Referenced by Simulator::sendCommand(), sim::sim(), and sim::~sim().
| const unsigned int MAX_SUBJECT_NAME = 50 |
maximum storage capacity of subject names
Definition at line 275 of file SharedGlobals.h.
| const unsigned int MAX_SUBJECTS = 50 |
maximum number of message queues the simulator can maintain
Definition at line 274 of file SharedGlobals.h.