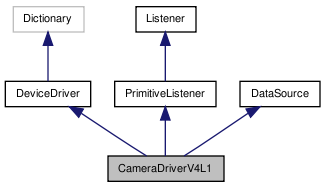
CameraDriverV4L1 Class Reference
description of CameraDriverV4L1 More...
#include <CameraDriverV4L1.h>
Detailed Description
description of CameraDriverV4L1
Definition at line 17 of file CameraDriverV4L1.h.
Public Member Functions | |
| CameraDriverV4L1 (const std::string &name) | |
| ~CameraDriverV4L1 () | |
| virtual std::string | getClassName () const |
| Returns the name of the class (aka its type). | |
| virtual void | getImageSources (std::map< std::string, DataSource * > &sources) |
| virtual unsigned int | nextTimestamp () |
| Returns the simulator time of the next data segment. | |
| virtual const std::string & | nextName () |
| Returns a descriptive name of the next data segment for user feedback (e.g. a filename for logged data). | |
| virtual unsigned int | getData (const char *&payload, unsigned int &payloadSize, unsigned int ×tamp, std::string &name) |
| virtual void | setDataSourceThread (LoadDataThread *th) |
| virtual void | plistValueChanged (const plist::PrimitiveBase &pl) |
| watches path, triggers a close() and re-open() if it changes | |
Public Attributes | |
| plist::Primitive< std::string > | path |
| plist::Primitive< unsigned int > | resolution |
| plist::Primitive< int > | layer |
| Controls the resolution layer at which the image should be processed. 0 indicates "automatic" mode (picks layer closest to image's resolution), positive numbers indicate the resolution layer directly. Negative values are relative to the number of layers marked available by the vision setup, so that typically -1 would correspond to the "double" layer, and -2 would correspond to the "full" layer. | |
| plist::Primitive< bool > | autobright |
Protected Member Functions | |
| void | close_cam () |
| void | open_cam () |
| void | get_cam_info () |
| void | set_cam_info () |
| void | set_resolution () |
| void | auto_bright () |
| void | interleave_yuv_down () |
| void | interleave_yuv_up () |
| size_t | getWidth () const |
| size_t | getHeight () const |
| size_t | getBufferSize () const |
Protected Attributes | |
| int | camfd |
| size_t | img_size |
| struct video_capability | vid_caps |
| struct video_window | vid_win |
| struct video_picture | vid_pic |
| unsigned int | frameCount |
| bool | isYUVMode |
| bool | blocking |
| std::vector< unsigned char > | curBuf |
| the buffer to write the image into | |
| std::vector< unsigned char > | lastBuf |
| the buffer we returned last time (might still be in use while writing curBuf) | |
| std::vector< unsigned char > | tmpBuf |
| used during interleave_yuv_up(), swapped back and forth with curBuf | |
| Thread::Lock | lock |
Static Protected Attributes | |
| static const size_t | HEADER_SIZE |
Static Private Attributes | |
| static const std::string | autoRegisterCameraDriverV4L1 |
| holds the class name, set via registration with the DeviceDriver registry | |
Constructor & Destructor Documentation
| CameraDriverV4L1 | ( | const std::string & | name | ) | [explicit] |
Definition at line 19 of file CameraDriverV4L1.h.
| ~CameraDriverV4L1 | ( | ) |
Definition at line 33 of file CameraDriverV4L1.h.
Member Function Documentation
| void auto_bright | ( | ) | [protected] |
| void close_cam | ( | ) | [protected] |
| void get_cam_info | ( | ) | [protected] |
| size_t getBufferSize | ( | ) | const [protected] |
Definition at line 69 of file CameraDriverV4L1.h.
| virtual std::string getClassName | ( | ) | const [virtual] |
Returns the name of the class (aka its type).
Suggested implementation is to declare a static string member, set it to the result of calling the registry's registerType, and then return that member here
Implements DeviceDriver.
Definition at line 38 of file CameraDriverV4L1.h.
| virtual unsigned int getData | ( | const char *& | payload, | |
| unsigned int & | payloadSize, | |||
| unsigned int & | timestamp, | |||
| std::string & | name | |||
| ) | [virtual] |
| size_t getHeight | ( | ) | const [protected] |
Definition at line 68 of file CameraDriverV4L1.h.
| virtual void getImageSources | ( | std::map< std::string, DataSource * > & | sources | ) | [virtual] |
Reimplemented from DeviceDriver.
Definition at line 40 of file CameraDriverV4L1.h.
| size_t getWidth | ( | ) | const [protected] |
Definition at line 67 of file CameraDriverV4L1.h.
| void interleave_yuv_down | ( | ) | [protected] |
| void interleave_yuv_up | ( | ) | [protected] |
| virtual const std::string& nextName | ( | ) | [virtual] |
Returns a descriptive name of the next data segment for user feedback (e.g. a filename for logged data).
Just use your class name if you don't have a useful name for individual samples.
Implements DataSource.
Definition at line 45 of file CameraDriverV4L1.h.
| virtual unsigned int nextTimestamp | ( | ) | [virtual] |
Returns the simulator time of the next data segment.
Should be in the future if nothing new since last data segment, otherwise should be the timestamp of the most recent data segment (older segments are skipped), return -1U if there is no more data
Implements DataSource.
Definition at line 44 of file CameraDriverV4L1.h.
| void open_cam | ( | ) | [protected] |
| virtual void plistValueChanged | ( | const plist::PrimitiveBase & | pl | ) | [virtual] |
watches path, triggers a close() and re-open() if it changes
Implements PrimitiveListener.
| void set_cam_info | ( | ) | [protected] |
| void set_resolution | ( | ) | [protected] |
| virtual void setDataSourceThread | ( | LoadDataThread * | th | ) | [virtual] |
Member Data Documentation
Definition at line 55 of file CameraDriverV4L1.h.
Referenced by CameraDriverV4L1().
const std::string autoRegisterCameraDriverV4L1 [static, private] |
holds the class name, set via registration with the DeviceDriver registry
Definition at line 100 of file CameraDriverV4L1.h.
Referenced by getClassName().
Definition at line 80 of file CameraDriverV4L1.h.
int camfd [protected] |
Definition at line 73 of file CameraDriverV4L1.h.
std::vector<unsigned char> curBuf [protected] |
the buffer to write the image into
Definition at line 82 of file CameraDriverV4L1.h.
unsigned int frameCount [protected] |
Definition at line 78 of file CameraDriverV4L1.h.
const size_t HEADER_SIZE [static, protected] |
Definition at line 71 of file CameraDriverV4L1.h.
Referenced by getBufferSize().
size_t img_size [protected] |
Definition at line 74 of file CameraDriverV4L1.h.
Definition at line 79 of file CameraDriverV4L1.h.
std::vector<unsigned char> lastBuf [protected] |
the buffer we returned last time (might still be in use while writing curBuf)
Definition at line 83 of file CameraDriverV4L1.h.
| plist::Primitive<int> layer |
Controls the resolution layer at which the image should be processed.
0 indicates "automatic" mode (picks layer closest to image's resolution), positive numbers indicate the resolution layer directly.
Negative values are relative to the number of layers marked available by the vision setup, so that typically -1 would correspond to the "double" layer, and -2 would correspond to the "full" layer.
Definition at line 54 of file CameraDriverV4L1.h.
Referenced by CameraDriverV4L1().
Thread::Lock lock [protected] |
Definition at line 85 of file CameraDriverV4L1.h.
| plist::Primitive<std::string> path |
Definition at line 52 of file CameraDriverV4L1.h.
Referenced by CameraDriverV4L1(), and ~CameraDriverV4L1().
| plist::Primitive<unsigned int> resolution |
Definition at line 53 of file CameraDriverV4L1.h.
Referenced by CameraDriverV4L1(), getBufferSize(), getHeight(), getWidth(), and ~CameraDriverV4L1().
std::vector<unsigned char> tmpBuf [protected] |
used during interleave_yuv_up(), swapped back and forth with curBuf
Definition at line 84 of file CameraDriverV4L1.h.
struct video_capability vid_caps [protected] |
Definition at line 75 of file CameraDriverV4L1.h.
struct video_picture vid_pic [protected] |
Definition at line 77 of file CameraDriverV4L1.h.
struct video_window vid_win [protected] |
Definition at line 76 of file CameraDriverV4L1.h.
Referenced by getBufferSize(), getHeight(), and getWidth().
The documentation for this class was generated from the following file: