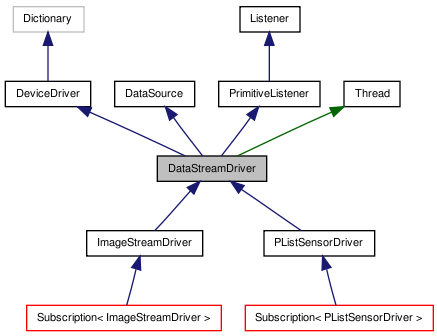
DataStreamDriver Class Reference
A generic base class for drivers which are receiving a stream of data through a comm port, also providing an interface to be used as a data source in another driver. More...
#include <DataStreamDriver.h>
Detailed Description
A generic base class for drivers which are receiving a stream of data through a comm port, also providing an interface to be used as a data source in another driver.
Definition at line 10 of file DataStreamDriver.h.
Public Member Functions | |
| DataStreamDriver (const std::string &className, const std::string &localName) | |
| virtual unsigned int | nextTimestamp () |
| Returns the simulator time of the next data segment. | |
| virtual const std::string & | nextName () |
| Returns a descriptive name of the next data segment for user feedback (e.g. a filename for logged data). | |
| virtual bool | advance () |
| Called when the simulator is stepping while paused or advancing a frozen data source, return true if successful, or false if no more data is available. | |
| virtual void | registerSource () |
| User hook, called when the data source should claim which outputs it provides feedback (providingOuput()). | |
| virtual void | deregisterSource () |
| User hook, called when the data source should release its claim on outputs with feedback (ignoringOuput()). | |
Public Attributes | |
| plist::Primitive< std::string > | commName |
| The name of the comm port from which data will be read. | |
| plist::Primitive< float > | srcFrameRate |
| The expected source framerate, used to regulate buffering. | |
| plist::Primitive< bool > | paceInput |
| If set to false, the driver will attempt to detect and run through any backlog on the comm port; if true, the driver will process each image in turn, enforcing SourceFPS. | |
Protected Member Functions | |
| virtual void | plistValueChanged (const plist::PrimitiveBase &pl) |
| virtual void * | run () |
| void | doFreeze () |
| user hook for when frozen is set to true; advance() will be called by simulator at user discretion. | |
| void | doUnfreeze () |
| user hook for when frozen is set to false; if enteringRealtime() has been called then you should resume sending data. | |
| virtual bool | readData (std::istream &is)=0 |
| Called when data should be read from the specified data stream and then provided to the framework. | |
| virtual CommPort * | getComm (const std::string &name) |
| allows subclasses to override the commport lookup | |
| virtual void | connect (CommPort *comm) |
| called when connection initialization is required (opens comm port, etc.) | |
| virtual void | disconnect (CommPort *comm) |
| called when connection destruction is required (closes comm port, etc.) | |
| virtual bool | requestFrame (CommPort &comm) |
| called if no image data is readily available, should return true if thread should block for frame | |
Protected Attributes | |
| unsigned int | timestamp |
| timestamp of last data received | |
| unsigned int | frameNumber |
| image frame number | |
| bool | registered |
| true if registerSource has been called and deregisterSource has not | |
| bool | realtime |
| true if enteringRealtime has been called more recently than leavingRealtime | |
Private Member Functions | |
| DataStreamDriver (const DataStreamDriver &) | |
| don't call | |
| DataStreamDriver & | operator= (const DataStreamDriver &) |
| don't call | |
Static Private Attributes | |
| static const std::string | autoRegisterDriver |
| holds the class name, set via registration with the DeviceDriver registry | |
Constructor & Destructor Documentation
| DataStreamDriver | ( | const std::string & | className, | |
| const std::string & | localName | |||
| ) | [explicit] |
Definition at line 12 of file DataStreamDriver.h.
| DataStreamDriver | ( | const DataStreamDriver & | ) | [private] |
don't call
Member Function Documentation
| bool advance | ( | ) | [virtual] |
Called when the simulator is stepping while paused or advancing a frozen data source, return true if successful, or false if no more data is available.
Implements DataSource.
Definition at line 12 of file DataStreamDriver.cc.
| void connect | ( | CommPort * | comm | ) | [protected, virtual] |
called when connection initialization is required (opens comm port, etc.)
Reimplemented in ImageStreamDriver.
Definition at line 113 of file DataStreamDriver.cc.
Referenced by plistValueChanged(), and registerSource().
| void deregisterSource | ( | ) | [virtual] |
User hook, called when the data source should release its claim on outputs with feedback (ignoringOuput()).
It would be wise to call this from your destructor as well.
Reimplemented from DataSource.
Reimplemented in ImageSubscription, DepthSubscription, and PListSensorDriver.
Definition at line 53 of file DataStreamDriver.cc.
| void disconnect | ( | CommPort * | comm | ) | [protected, virtual] |
called when connection destruction is required (closes comm port, etc.)
Reimplemented in ImageStreamDriver.
Definition at line 124 of file DataStreamDriver.cc.
Referenced by deregisterSource(), and plistValueChanged().
| void doFreeze | ( | ) | [protected, virtual] |
user hook for when frozen is set to true; advance() will be called by simulator at user discretion.
Reimplemented from DataSource.
Reimplemented in Subscription< PListSensorDriver >, and Subscription< ImageStreamDriver >.
Definition at line 66 of file DataStreamDriver.cc.
| void doUnfreeze | ( | ) | [protected, virtual] |
user hook for when frozen is set to false; if enteringRealtime() has been called then you should resume sending data.
Reimplemented from DataSource.
Reimplemented in Subscription< PListSensorDriver >, and Subscription< ImageStreamDriver >.
Definition at line 58 of file DataStreamDriver.cc.
| virtual CommPort* getComm | ( | const std::string & | name | ) | [protected, virtual] |
allows subclasses to override the commport lookup
Reimplemented in Subscription< PListSensorDriver >, and Subscription< ImageStreamDriver >.
Definition at line 54 of file DataStreamDriver.h.
Referenced by advance(), deregisterSource(), nextTimestamp(), ImageStreamDriver::plistValueChanged(), plistValueChanged(), registerSource(), and run().
| virtual const std::string& nextName | ( | ) | [virtual] |
Returns a descriptive name of the next data segment for user feedback (e.g. a filename for logged data).
Just use your class name if you don't have a useful name for individual samples.
Implements DataSource.
Reimplemented in Subscription< PListSensorDriver >, and Subscription< ImageStreamDriver >.
Definition at line 23 of file DataStreamDriver.h.
Referenced by ImageStreamDriver::readImage().
| unsigned int nextTimestamp | ( | ) | [virtual] |
Returns the simulator time of the next data segment.
Should be in the future if nothing new since last data segment, otherwise should be the timestamp of the most recent data segment (older segments are skipped), return -1U if there is no more data
Implements DataSource.
Definition at line 5 of file DataStreamDriver.cc.
Referenced by run().
| DataStreamDriver& operator= | ( | const DataStreamDriver & | ) | [private] |
don't call
| void plistValueChanged | ( | const plist::PrimitiveBase & | pl | ) | [protected, virtual] |
Implements PrimitiveListener.
Reimplemented in ImageStreamDriver, ImageSubscription, DepthSubscription, Subscription< PListSensorDriver >, and Subscription< ImageStreamDriver >.
Definition at line 73 of file DataStreamDriver.cc.
| virtual bool readData | ( | std::istream & | is | ) | [protected, pure virtual] |
Called when data should be read from the specified data stream and then provided to the framework.
If paceInput is set, your implementation should use readsome() to skim through to the last available data packet, and provide only that data to the framework
Implemented in ImageStreamDriver, and PListSensorDriver.
| void registerSource | ( | ) | [virtual] |
User hook, called when the data source should claim which outputs it provides feedback (providingOuput()).
Does not indicate the data source should start sending updates yet — wait for enteringRealtime() or advance() to be called
Reimplemented from DataSource.
Reimplemented in ImageSubscription, and DepthSubscription.
Definition at line 48 of file DataStreamDriver.cc.
called if no image data is readily available, should return true if thread should block for frame
Reimplemented in Subscription< PListSensorDriver >, and Subscription< ImageStreamDriver >.
Definition at line 60 of file DataStreamDriver.h.
Referenced by advance().
| void * run | ( | ) | [protected, virtual] |
Reimplemented from Thread.
Definition at line 89 of file DataStreamDriver.cc.
Member Data Documentation
const std::string autoRegisterDriver [static, private] |
holds the class name, set via registration with the DeviceDriver registry
Reimplemented in ImageStreamDriver, and PListSensorDriver.
Definition at line 70 of file DataStreamDriver.h.
| plist::Primitive<std::string> commName |
The name of the comm port from which data will be read.
Definition at line 29 of file DataStreamDriver.h.
Referenced by advance(), connect(), DataStreamDriver(), deregisterSource(), disconnect(), nextTimestamp(), ImageStreamDriver::plistValueChanged(), plistValueChanged(), registerSource(), and run().
unsigned int frameNumber [protected] |
image frame number
Definition at line 63 of file DataStreamDriver.h.
Referenced by ImageStreamDriver::readImage().
If set to false, the driver will attempt to detect and run through any backlog on the comm port; if true, the driver will process each image in turn, enforcing SourceFPS.
This mainly comes up if you do something like 'mkfifo pipe; cat *.jpg > pipe', and then open 'pipe' as the input for ImageStreamDriver... if paceInput is turned off, you'll only get the last image. However, using PaceInput on 'live' sources may cause a backlog to form.
Definition at line 38 of file DataStreamDriver.h.
Referenced by DataStreamDriver(), PListSensorDriver::readData(), ImageStreamDriver::readData(), and run().
true if enteringRealtime has been called more recently than leavingRealtime
Definition at line 66 of file DataStreamDriver.h.
Referenced by connect(), doFreeze(), doUnfreeze(), and plistValueChanged().
bool registered [protected] |
true if registerSource has been called and deregisterSource has not
Definition at line 65 of file DataStreamDriver.h.
Referenced by deregisterSource(), and registerSource().
The expected source framerate, used to regulate buffering.
Definition at line 32 of file DataStreamDriver.h.
Referenced by advance(), connect(), DataStreamDriver(), disconnect(), doFreeze(), doUnfreeze(), nextTimestamp(), plistValueChanged(), and run().
unsigned int timestamp [protected] |
timestamp of last data received
Definition at line 62 of file DataStreamDriver.h.
Referenced by advance(), nextTimestamp(), PListSensorDriver::readData(), and ImageStreamDriver::readImage().
The documentation for this class was generated from the following files: