DynamicInfo.h File Reference
Defines RobotInfo namespace for 'dynamic' models, gives some information about the robot's capabilities, such as joint counts, offsets, names and PID values. More...
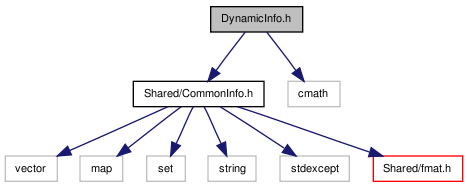
#include "Shared/CommonInfo.h"#include <cmath>
Include dependency graph for DynamicInfo.h:
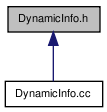
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | DynamicInfo::DynamicCapabilities |
| provides polymorphic robot capability detection/mapping More... | |
| struct | DynamicInfo::DynamicInfoRow< T, N > |
| provides 2D array of constant width More... | |
Namespaces | |
| namespace | DynamicInfo |
Declares symbols for the 'Dynamic' robot model, used for tools which are model agnostic. | |
Variables | |
| const unsigned int | DynamicInfo::FrameTime = 32 |
| time between frames in the motion system (milliseconds) | |
| const unsigned int | DynamicInfo::NumFrames = 1 |
| the number of frames per buffer (don't forget also double buffered) | |
| const unsigned int | DynamicInfo::SoundBufferTime = 32 |
| the number of milliseconds per sound buffer... I'm not sure if this can be changed | |
Detailed Description
Defines RobotInfo namespace for 'dynamic' models, gives some information about the robot's capabilities, such as joint counts, offsets, names and PID values.
Definition in file DynamicInfo.h.