EventRouter.h File Reference
Describes EventRouter class, for distribution and trapping of events to listeners. More...
#include <string>#include <vector>#include <queue>#include <map>#include <list>#include <algorithm>#include "EventListener.h"#include "EventTrapper.h"#include "Shared/get_time.h"#include "Shared/attributes.h"#include "IPC/ProcessID.h"#include <iostream>#include "Shared/RobotInfo.h"#include "Shared/RemoteState.h"#include "Wireless/SocketListener.h"#include "Wireless/Socket.h"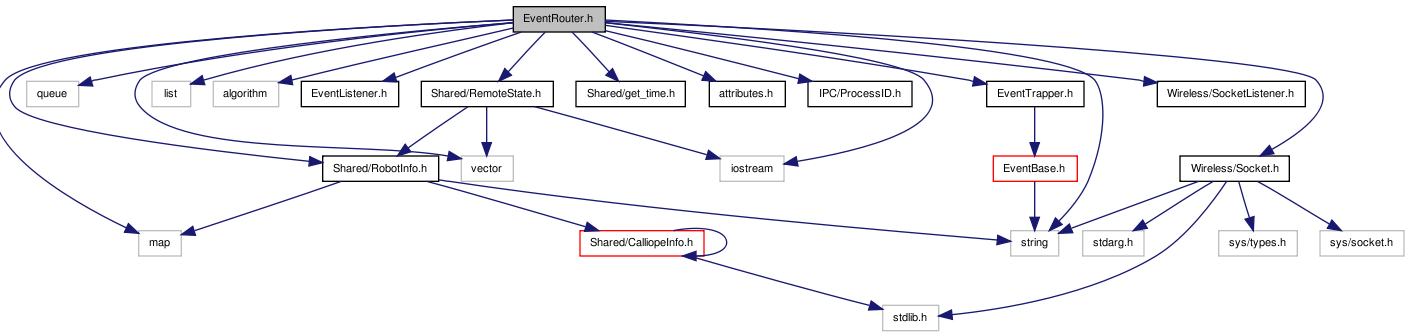
Go to the source code of this file.
Classes | |
| class | EventRouter |
| This class will handle distribution of events as well as management of timers. More... | |
| struct | EventRouter::TimerEntry |
| Contains all the information needed to maintain a timer by the EventRouter. More... | |
| class | EventRouter::TimerEntryPtrCmp |
| Used by STL to sort the timer list in order of activation time. More... | |
| class | EventRouter::EventMapper |
| Does the actual storage of the mapping between EventBase's and the EventListeners/EventTrappers who should receive them. More... | |
| class | EventRouter::PostingStatus |
| contains information regarding the progress of posting an event More... | |
| struct | EventRouter::SameID |
| Predicate used to remove old events from the same event source from eventQueue (see requeueEvent()). More... | |
Variables | |
| EventRouter * | erouter |
| a global router for cross communication, probably the most common usage, although perhaps there may be times you'd rather have multiple event routers for smaller sections | |
Detailed Description
Describes EventRouter class, for distribution and trapping of events to listeners.
Definition in file EventRouter.h.
Variable Documentation
a global router for cross communication, probably the most common usage, although perhaps there may be times you'd rather have multiple event routers for smaller sections
Definition at line 24 of file EventRouter.cc.
Referenced by WalkCalibration::activate(), ValueEditControl< T >::activate(), TorqueCalibrate::TakeMeasurementControl::activate(), PostureEditor::activate(), Controller::activate(), EventGeneratorBase::addSrcListener(), WMitem< T >::announce(), EventLogger::clearSlots(), Controller::console_callback(), BallDetectionGenerator::createEvent(), WalkCalibration::deactivate(), TorqueCalibrate::TakeMeasurementControl::deactivate(), SensorObserverControl::RTViewControl::deactivate(), PostureEditor::deactivate(), Controller::deactivate(), MotionManager::doAddMotion(), TextMsgTrans::doEvent(), SignalTrans< T >::doEvent(), SegmentedColorGenerator::doEvent(), RLEGenerator::doEvent(), RegionGenerator::doEvent(), RawCameraGenerator::doEvent(), PNGGenerator::doEvent(), PitchDetector::doEvent(), PilotTrans::doEvent(), LookAtMarkers::Search::doEvent(), LookAtMarkers::TrackMarker::doEvent(), KoduInterpreter::ReceiveActionRunner::ReceiveActionStart::doEvent(), KoduInterpreter::GiveActionRunner::GiveActionStart::doEvent(), JPEGGenerator::doEvent(), InterleavedYUVGenerator::doEvent(), GrasperNode::doEvent(), FlashIPAddrBehavior::doEvent(), FFPlanNode::doEvent(), FFPlanner::doEvent(), CompletionTrans::doEvent(), CDTGenerator::doEvent(), BufferedImageGenerator::doEvent(), BehaviorBase::doEvent(), BatteryMonitorBehavior::doEvent(), Transition::doFire(), SensorObserverControl::doSelect(), EventLogger::doSelect(), WorldStateSerializerBehavior::doStart(), WMMonitorBehavior::doStart(), SegCam::doStart(), RegionCam::doStart(), RawCam::doStart(), DualCoding::Lookout::doStart(), LookAtMarkers::Search::doStart(), LookAtMarkers::TrackMarker::doStart(), KoduInterpreter::NotificationMonitor::doStart(), KoduInterpreter::CompleteSayActuator::doStart(), KoduInterpreter::ReceiveActionRunner::ReceiveActionStart::doStart(), KoduInterpreter::GiveActionRunner::GiveActionSend::doStart(), KoduInterpreter::GiveActionRunner::GiveActionStart::doStart(), Grasper::GrasperFailed::doStart(), Grasper::GrasperSucceeded::doStart(), FlashIPAddrBehavior::doStart(), EventGeneratorBase::doStart(), EStopController::doStart(), EchoBehavior::doStart(), DepthCam::doStart(), DeadReckoningBehavior< ParticleT >::doStart(), Controller::doStart(), CameraBehavior::doStart(), BatteryMonitorBehavior::doStart(), WorldStateSerializerBehavior::doStop(), WMMonitorBehavior::doStop(), SegCam::doStop(), RegionCam::doStop(), RawCam::doStop(), HeadController::doStop(), FreeMemReportControl::doStop(), FlashIPAddrBehavior::doStop(), EventGeneratorBase::doStop(), EchoBehavior::doStop(), DepthCam::doStop(), Controller::doStop(), CameraBehavior::doStop(), ArmController::doStop(), SoundManager::endPlay(), DualCoding::MapBuilder::executeRequest(), DualCoding::Lookout::executeRequest(), Grasper::executeRequest(), RandomTrans::fire(), RemoteRouter::forwardEvent(), MoCapLogger::gotMoCapSingle(), MoCapLogger::gotTxtMsgSingle(), EventProxy::handleRemoteRequest(), EventGeneratorBase::hasListeners(), KoduDiscover::KoduDiscover(), KoduInterpreter::KoduEventListener::listenTo(), BehaviorBase::MonitorMotion::monitor(), ValueEditControl< T >::pause(), SensorObserverControl::RTViewControl::pause(), PostureEditor::pause(), FFPlanNode::plan(), FFPlanner::plan(), SoundManager::play(), MotionCommand::postEvent(), WaypointEngineNode< W, mcName, mcDesc >::postStart(), VisualTargetTrans::postStart(), VisualTargetCloseTrans::postStart(), TrackNode::postStart(), TimeOutTrans::postStart(), SpeechNode::postStart(), SignalTrans< T >::postStart(), PilotTrans::postStart(), PilotNode::postStart(), MCNode< T, mcName, mcDesc, completes >::postStart(), MapBuilderNode::postStart(), LogNode::postStart(), GrasperTrans::postStart(), GrasperNode::postStart(), CompletionTrans::postStart(), CompareTrans< T >::postStart(), StateNode::postStateCompletion(), StateNode::postStateSignal(), StateNode::postStateStart(), StateNode::postStateStop(), TextMsgTrans::preStart(), RecordMotionNode::preStart(), NullTrans::preStart(), DualCoding::MapBuilder::preStart(), LostTargetTrans::preStart(), EventTrans::preStart(), ConnectionMadeTrans::preStart(), TorqueCalibrate::TakeMeasurementControl::processEvent(), RunSequenceControl< SequenceSize >::processEvent(), RemoteRouter::processEvent(), PostureEditor::processEvent(), LoadPostureControl::processEvent(), GamepadController::processInput(), SoundManager::ProcessMsg(), MotionManager::processMsg(), DualCoding::Lookout::processPointAtEvent(), DualCoding::Lookout::processScanEvent(), DualCoding::Lookout::processSearchEvent(), DualCoding::Lookout::processTrackEvent(), WorldState::read(), CameraStreamBehavior::receiveData(), SensorObserverControl::RTViewControl::refresh(), PostureEditor::refresh(), MoCapLogger::refresh(), MoCapLogger::registered(), ArmController::relax(), RemoteRouter::RemoteRouter(), MotionManager::removeMotion(), EventGeneratorBase::removeSrcListener(), DualCoding::MapBuilder::requestComplete(), DualCoding::Lookout::requestComplete(), TimeOutTrans::resetTimer(), FreeMemReportControl::resetTimerFreq(), EventLogger::runCommand(), RunSequenceControl< SequenceSize >::selectedFile(), LoadPostureControl::selectedFile(), RemoteRouter::sendRemoteRequest(), EventGeneratorBase::setAutoListen(), MCNodeBase::setMC(), DualCoding::Lookout::setupSearch(), FlashIPAddrBehavior::setupSequence(), DualCoding::Lookout::setupTrack(), GamepadController::shutdown(), GamepadController::start(), SoundNode::startPlaying(), BatteryMonitorBehavior::startWarning(), CompletionTrans::stop(), BehaviorBase::stop(), SoundManager::stopPlay(), BatteryMonitorBehavior::stopWarning(), TorqueCalibrate::TakeMeasurementControl::takeInput(), Controller::takeLine(), TorqueCalibrate::TakeMeasurementControl::transition(), DualCoding::Lookout::triggerScanMotionSequence(), ArmController::unrelax(), WMitem_base::unwatch(), RemoteState::update(), WMitem_base::watch(), BehaviorBase::~BehaviorBase(), EventCallbackAs< EventBase >::~EventCallbackAs(), KoduDiscover::~KoduDiscover(), LoadPostureControl::~LoadPostureControl(), BehaviorBase::MonitorMotion::~MonitorMotion(), and RunSequenceControl< SequenceSize >::~RunSequenceControl().