ShapeSpacePlanner3DR.h File Reference
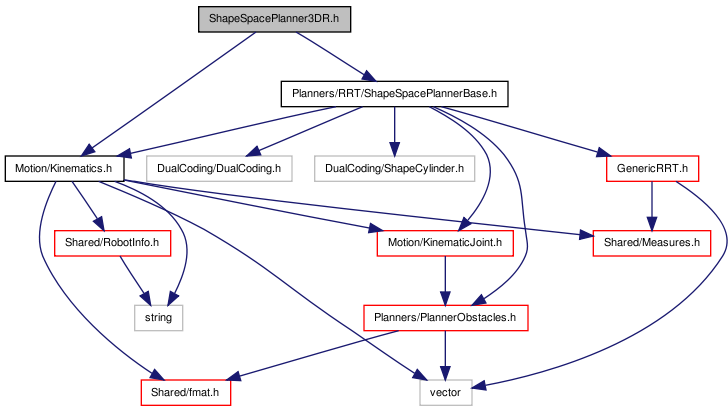
#include "Motion/Kinematics.h"#include "Planners/RRT/ShapeSpacePlannerBase.h"
Include dependency graph for ShapeSpacePlanner3DR.h:
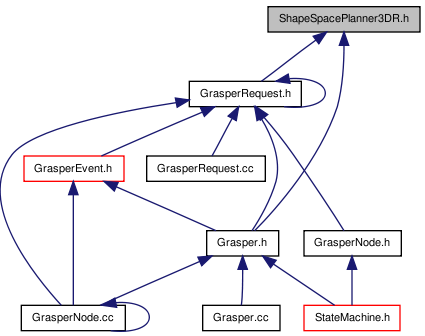
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | RRTNode3DR< N > |
| class | RRTNode3DR< N >::NodeValueWrapper |
| class | RRTNode3DR< N >::CollisionChecker |
| class | RRTNode3DR< N >::CollisionChecker::JointObstacle |
| Coarse box-type obstacle representing a joint and all its components. More... | |
| class | RRTNode3DR< N >::CollisionChecker::LinkObstacle |
| An obstacle representing the actual shape of one robot component. More... | |
| class | ShapeSpacePlanner3DR< N > |
| Plans a path in a n-dimensional angular space, uses forward kinematics for collision testing. More... | |