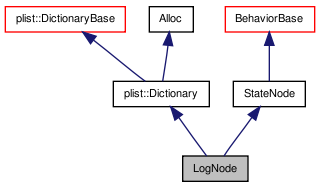
LogNode Class Reference
On activation, start logging data to disk as a series of image and/or sensor files. More...
#include <LogNode.h>
Detailed Description
On activation, start logging data to disk as a series of image and/or sensor files.
Definition at line 10 of file LogNode.h.
Public Member Functions | |
| LogNode () | |
| default constructor, use type name as instance name | |
| LogNode (const std::string &nm) | |
| constructor, take an instance name | |
| virtual void | postStart () |
| Called by start() after the doStart(), allows superclasses to complete initialization. | |
| virtual void | doEvent () |
| Delegate function for event processing, the event itself is pointed to (only for the duration of the doEvent() call!) by event. | |
| virtual void | stop () |
| Just like a behavior, called when it's time to stop doing your thing. | |
| virtual void | writeImage (unsigned int time, class FilterBankGenerator &fbk, bool isPNG) |
| virtual void | writeSensor (unsigned int time) |
| virtual std::string | getDescription () const |
| Gives a short description of what this particular instantiation does (in case a more specific description is needed on an individual basis). | |
Static Public Member Functions | |
| static std::string | getClassDescription () |
| Gives a short description of what this class of behaviors does... you should override this (but don't have to). | |
Public Attributes | |
| plist::Primitive< std::string > | basepath |
| plist::Primitive< std::string > | basename |
| plist::Primitive< bool > | incrementNameIfExists |
| plist::Primitive< bool > | logSensors |
| plist::Primitive< bool > | logImages |
| plist::Primitive< bool > | initial |
| plist::Primitive< std::string > | compression |
Protected Attributes | |
| std::ofstream | indexFile |
| std::string | path |
| unsigned int | startTime |
| unsigned int | fileCount |
| unsigned int | imageStartFrame |
| unsigned int | sensorStartFrame |
Private Member Functions | |
| LogNode (const LogNode &) | |
| don't call (copy constructor) | |
| LogNode & | operator= (const LogNode &) |
| don't call (assignment operator) | |
Constructor & Destructor Documentation
| LogNode::LogNode | ( | ) |
| LogNode::LogNode | ( | const std::string & | nm | ) |
| LogNode::LogNode | ( | const LogNode & | ) | [private] |
don't call (copy constructor)
Member Function Documentation
| void LogNode::doEvent | ( | ) | [virtual] |
Delegate function for event processing, the event itself is pointed to (only for the duration of the doEvent() call!) by event.
Default implementation watches for 'private' text message events (those forwarded by a BehaviorSwitchControl from ControllerGUI input) and will publically rebroadcast them. The idea is that your own processEvent gets first dibs, but if the behavior doesn't handle the text message, it will be handed off for others.
Reimplemented from BehaviorBase.
Definition at line 115 of file LogNode.cc.
| static std::string LogNode::getClassDescription | ( | ) | [static] |
Gives a short description of what this class of behaviors does... you should override this (but don't have to).
If you do override this, also consider overriding getDescription() to return it
Reimplemented from BehaviorBase.
Definition at line 65 of file LogNode.h.
Referenced by getDescription().
| virtual std::string LogNode::getDescription | ( | ) | const [virtual] |
Gives a short description of what this particular instantiation does (in case a more specific description is needed on an individual basis).
By default simply returns getName(), because any calls from a BehaviorBase function to getClassDescription() are going to call BehaviorBase::getClassDescription(), not ~YourSubClass~getClassDescription(), because static functions can't be virtual in C++ (doh!)
This means that getDescription called on a pointer to a BehaviorBase of unknown subtype would always return an empty string, which is pretty useless. So instead we return the name in this situation. If you want getDescription to return getClassDescription, you'll have to override it in your subclass to do so.
Reimplemented from BehaviorBase.
| void LogNode::postStart | ( | ) | [virtual] |
Called by start() after the doStart(), allows superclasses to complete initialization.
For robustness to future change, subclasses should be sure to call the superclass implementation.
Reimplemented from BehaviorBase.
Definition at line 24 of file LogNode.cc.
| void LogNode::stop | ( | ) | [virtual] |
Just like a behavior, called when it's time to stop doing your thing.
Reimplemented from StateNode.
Definition at line 137 of file LogNode.cc.
| void LogNode::writeImage | ( | unsigned int | time, | |
| class FilterBankGenerator & | fbk, | |||
| bool | isPNG | |||
| ) | [virtual] |
Definition at line 142 of file LogNode.cc.
Referenced by doEvent(), and postStart().
| void LogNode::writeSensor | ( | unsigned int | time | ) | [virtual] |
Definition at line 163 of file LogNode.cc.
Referenced by doEvent(), and postStart().
Member Data Documentation
| plist::Primitive<std::string> LogNode::basename |
Definition at line 38 of file LogNode.h.
Referenced by postStart(), writeImage(), and writeSensor().
| plist::Primitive<std::string> LogNode::basepath |
Definition at line 37 of file LogNode.h.
Referenced by postStart().
| plist::Primitive<std::string> LogNode::compression |
Definition at line 43 of file LogNode.h.
Referenced by postStart().
unsigned int LogNode::fileCount [protected] |
Definition at line 49 of file LogNode.h.
Referenced by postStart(), writeImage(), and writeSensor().
unsigned int LogNode::imageStartFrame [protected] |
Definition at line 50 of file LogNode.h.
Referenced by postStart(), and writeImage().
Definition at line 39 of file LogNode.h.
Referenced by postStart().
std::ofstream LogNode::indexFile [protected] |
Definition at line 46 of file LogNode.h.
Referenced by postStart(), stop(), writeImage(), and writeSensor().
Definition at line 42 of file LogNode.h.
Referenced by postStart().
Definition at line 41 of file LogNode.h.
Referenced by postStart().
Definition at line 40 of file LogNode.h.
Referenced by postStart().
std::string LogNode::path [protected] |
Definition at line 47 of file LogNode.h.
Referenced by postStart(), writeImage(), and writeSensor().
unsigned int LogNode::sensorStartFrame [protected] |
Definition at line 51 of file LogNode.h.
Referenced by postStart(), and writeSensor().
unsigned int LogNode::startTime [protected] |
Definition at line 48 of file LogNode.h.
Referenced by postStart(), writeImage(), and writeSensor().
The documentation for this class was generated from the following files: