WaypointEngine Class Reference
Provides computation and management of a desired path through a series of waypoints. More...
#include <WaypointEngine.h>
Detailed Description
Provides computation and management of a desired path through a series of waypoints.
This is a generalized set of data structures and management code - it doesn't actually say anything about how you get from one waypoint to the other, it will just tell you where you should be going at any given time.
So, for instance, you may be interested in WaypointWalk, which will use a WalkMC to traverse the waypoints. Future development may include a WaypointPush, to push an object along a path instead of just moving the body along a path.
Although general curves between waypoints are not supported, you can use either circular arcs or straight lines.
The Waypoint class holds the actual data about each waypoint. You can specify waypoints in 3 ways: egocentric, offset, and absolute.
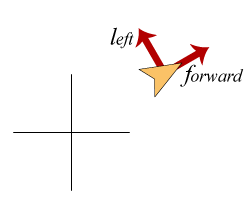
Egocentric: the x and y parameters are relative to the body itself; x is always forward and y is always left. Handy for turtle/logo style specification of instructions | 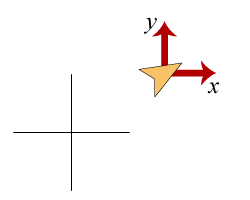
Offset: the x and y parameters are relative to the current body position, but not its heading. | 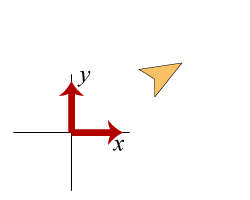
Absolute: the x and y parameters are direct coordinates |
These specify the position of the next waypoint, but we also need to be able to specify the orientation (heading) of the robot. This is done by specifying an angle and a mode which controls how that angle is interpreted: Waypoint::angleIsRelative, which can be true or false.
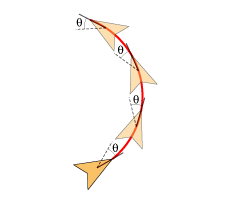
angleIsRelative==true: The angle is relative to the path, so that 0 will keep the robot pointed in the direction of travel, even when arcing. Similarly,  would cause the robot to walk sideways. would cause the robot to walk sideways. | 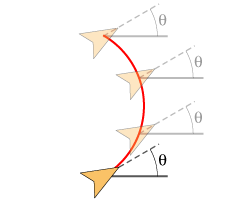
angleIsRelative==false: The angle is relative to the world coordinate system, so a constant heading is maintained throughout execution of the path. |
The final orientation of the robot is simply the heading it was facing when it reaches the end point. To turn in place, you can use a (0,0) egocentric or offset waypoint with an angle parameter.
In order to execute curves, you can supply an arc value:
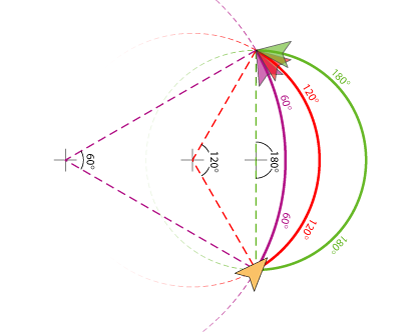
Here you see the results of 3 different arc values  . Note how the arc parameter corresponds to the angle of the circle which is swept. . Note how the arc parameter corresponds to the angle of the circle which is swept. |
There are two ways to specify arcs. The add*Waypoint functions use the position arguments to specify the end point of the arc, and the arc parameter serves to "bow" the path. The add*Arc functions specify the center of the circle as the position, and the end point is inferred from the amount of the arc to sweep.
Beware that arcs greater than  are entirely possible, but will create larger and larger circles which may cause the robot to initially start moving away from the destination. This isn't necessarily a bad thing, but may be unanticipated. Values approaching
are entirely possible, but will create larger and larger circles which may cause the robot to initially start moving away from the destination. This isn't necessarily a bad thing, but may be unanticipated. Values approaching  may cause numerical instability yielding infinitely large circles. Values larger than will be normalized to the range
may cause numerical instability yielding infinitely large circles. Values larger than will be normalized to the range  .
.
Dead reckoning is very prone to accruing error. It is highly recommended that you calibrate the locomotion mechanism carefully (see WalkCalibration, available under the "Walk Edit" menu with a run-time help menu) and implement some form of localization to handle the inevitable drift.
If you have a localization module in place, you can use the setCurPos() function to update the position of the robot within the world. WaypointEngine provides two ways to handle this ensuing discrepency from the path the robot had been tracing:
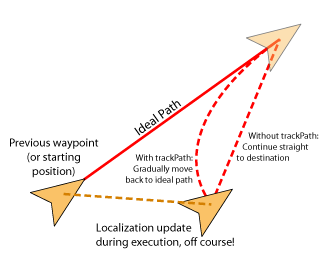
The effect of the Waypoint::trackPath flag. When true, the robot will attempt to catch up to its "ideal" location after a perturbation. When false, the robot will ignore the "ideal" path, and just go straight to the destination from wherever perturbations may push it. |
trackPath is a per-waypoint setting, setTracking() sets the default value for any new waypoints which are thereafter created (the default default is false ;)
Waypoint list files are a fairly straightforward plain text format. The extension .wyp is suggested.
The waypoint file format is:
- '
#WyP' - header to verify file type - A series of entries:
- '
max_turn_speednum' - sets the maximum error-correction turning speed used for all following waypoints - '
track_pathbool' - sets trackpath mode on or off for all following waypoints (see Waypoint::trackPath) - '
add_point{ego|off|abs}hold|follow} - '
add_arc{ego|off|abs}hold|follow}
- '
- '
#END' - footer to verify ending of file
Definition at line 119 of file WaypointEngine.h.
Public Types | |
| typedef std::vector< Waypoint > | WaypointList_t |
| convenient shorthand | |
| typedef std::vector< Waypoint > ::iterator | WaypointListIter_t |
| convenient shorthand | |
| typedef std::vector< Waypoint > ::const_iterator | WaypointListConstIter_t |
| convenient shorthand | |
Public Member Functions | |
| WaypointEngine () | |
| constructor | |
| WaypointEngine (char *f) | |
| constructor | |
| virtual unsigned int | getBinSize () const |
| returns a rough overestimate of the size needed | |
| virtual unsigned int | loadBuffer (const char buf[], unsigned int len, const char *filename=NULL) |
| Load from a saved buffer in memory. | |
| virtual unsigned int | saveBuffer (char buf[], unsigned int len) const |
| Save to a given buffer in memory. | |
| virtual unsigned int | loadFile (const char *filename) |
| initiate opening of the specified file and loading/saving of all appropriate information. | |
| virtual unsigned int | saveFile (const char *filename) const |
| initiate opening of the specified file and loading/saving of all appropriate information. | |
| virtual void | go () |
| starts walking towards the first waypoint | |
| virtual void | pause () |
| halts execution of waypoint list | |
| virtual void | unpause () |
| resumes execution of waypoint list from last paused location | |
| virtual void | setIsLooping (bool isl) |
| sets isLooping | |
| virtual bool | getIsLooping () const |
| returns isLooping | |
| virtual WaypointList_t & | getWaypointList () |
| returns a reference to waypoints | |
| virtual const WaypointList_t & | getWaypointList () const |
| returns a const reference to waypoints | |
| virtual WaypointListIter_t | getCurWaypointID () const |
| returns id value of current waypoint (curWaypoint) | |
| virtual float | getCurX () const |
| returns current x position | |
| virtual float | getCurY () const |
| returns current y position | |
| virtual float | getCurA () const |
| virtual void | setCurPos (float x, float y, float a) |
| sets the current position (for instance your localization module has an update) | |
| virtual void | setTracking (bool b) |
| sets the isTracking flag, only affects future waypoints which are added, not currently listed waypoints (use getWaypointList() to modify existing waypoints) | |
| virtual bool | getTracking () const |
| returns isTracking | |
| virtual bool | cycle () |
| call this on each opportunity to check current location and correct velocities | |
| virtual void | setTargetWaypoint (WaypointListIter_t iter) |
| will set the currently active waypoint to another waypoint; correctly calculates location of intermediate waypoints so target location will be the same as if the intervening waypoints had actually been executed | |
| Waypoint | calcAbsoluteCoords (WaypointListIter_t it) |
| if it follows the current waypoint, applies all the waypoints between curWaypoint and it and returns result as an absolute position (angle field stores heading); otherwise calls the other calcAbsoluteCoords(WaypointListIter_t, float, float, float) | |
| Waypoint | calcAbsoluteCoords (WaypointListIter_t it, float sx, float sy, float sa) |
| starts at (sx, sy, heading=sa) and then applies all the waypoints up through it and returns result as an absolute position (angle field stores heading) | |
Adding Waypoints | |
these are for convenience - can also directly edit the waypoint list using access from getWaypointList() | |
| virtual void | addEgocentricWaypoint (float forward, float left, float angle, bool angleIsRelative, float fwdSpeed, float turnSpeed=-1.f) |
| adds a waypoint to the end of the list, allows you to specify turtle-style instructions | |
| virtual void | addOffsetWaypoint (float x, float y, float angle, bool angleIsRelative, float fwdSpeed, float turnSpeed=-1.f) |
| adds a waypoint to the end of the list, allows you to set locations relative to the location of the previous waypoint (or starting position) | |
| virtual void | addAbsoluteWaypoint (float x, float y, float angle, bool angleIsRelative, float fwdSpeed, float turnSpeed=-1.f) |
| adds a waypoint to the end of the list, allows you to set locations relative to the world coordinate frame | |
| virtual void | addEgocentricArc (float forward, float left, float angle, bool angleIsRelative, float speed, float arc) |
| adds a waypoint to the end of the list, using an arcing path to get there, allows you to specify turtle-style instructions to specify the focus of the arc | |
| virtual void | addOffsetArc (float x, float y, float angle, bool angleIsRelative, float speed, float arc) |
| adds a waypoint to the end of the list, using an arcing path to get there, allows you to specify locations relative to previous waypoint to specify the focus of the arc | |
| virtual void | addAbsoluteArc (float x, float y, float angle, bool angleIsRelative, float speed, float arc) |
| adds a waypoint to the end of the list, using an arcing path to get there, allows you to specify absolute locations to specify the focus of the arc | |
| virtual void | appendWaypoints (const WaypointList_t wpl) |
| adds a waypoint to the end of the list, allows you to specify turtle-style instructions | |
| virtual void | clearWaypointList () |
| adds a waypoint to the end of the list, allows you to specify turtle-style instructions | |
Protected Member Functions | |
| void | init () |
| basic memory initialization | |
| void | fixArc (float arc) |
| assumes the last waypoint is actually center of circle, adjusts it to be the endpoint of following arc radians around that circle instead | |
| void | computeCurrentPosition (unsigned int t) |
| based on current velocity and time since last call, dead reckons current location in curPos | |
| void | checkNextWaypoint (unsigned int t) |
| checks to see if curPos is within eps of targetPos; if so, setTargetWaypoint() to next waypoint | |
| void | computeIdeal (unsigned int t) |
| computes the ideal location (idealPos) if we were following the intended path at the intended speed | |
| void | computeNewVelocity (unsigned int t) |
| computes the velocity which should be used given the current position (curPos) relative to the ideal position (idealPos) | |
Static Protected Member Functions | |
| static float | tgtCreateTurnFudgeFactor (float angle) |
| static float | fudgedAngle (float originalAngle) |
Protected Attributes | |
| WaypointList_t | waypoints |
| storage for the waypoints | |
| bool | isRunning |
| true if we're currently executing the path | |
| bool | isLooping |
| true if we should loop when done | |
| bool | isTracking |
| new waypoints will use trackPath mode | |
| WaypointListIter_t | curWaypoint |
| index of current waypoint | |
| unsigned int | waypointTime |
| time we started working on current waypoint | |
| float | waypointDistance |
| distance from sourcePos to targetPos | |
| float | pathLength |
| distance to be traveled from sourcePos to targetPos (may differ from waypointDistance due to arcing) | |
| float | arcRadius |
| radius of current arc, may be inf or NaN if using a straight line; can also be negative depending on direction! | |
| unsigned int | lastUpdateTime |
| time we last updated curPos | |
| float | pathStartPos [3] |
| position when started execution of current path (aka origin offset for relative positions which preceed an absolute waypoint) | |
| float | sourcePos [3] |
| source position of the robot relative to the origin, aka absolute position of previous waypoint | |
| float | targetPos [3] |
| target position of the robot relative to the origin, aka absolute position of next waypoint | |
| float | idealPos [4] |
| ideal position of the robot relative to the origin, (x, y, heading, last element is desired direction of motion) | |
| float | curPos [3] |
| current position of the robot relative to the origin | |
| float | curVel [3] |
| current velocity | |
| float | eps [3] |
| epsilon - "close enough" to register a hit on the waypoint | |
| float | Pcorr |
| proportional correction factor for tracking path | |
| float | defaultTurnSpeed |
| maximum turning speed for new waypoints | |
Member Typedef Documentation
| typedef std::vector<Waypoint> WaypointEngine::WaypointList_t |
convenient shorthand
Definition at line 122 of file WaypointEngine.h.
| typedef std::vector<Waypoint>::const_iterator WaypointEngine::WaypointListConstIter_t |
convenient shorthand
Definition at line 124 of file WaypointEngine.h.
| typedef std::vector<Waypoint>::iterator WaypointEngine::WaypointListIter_t |
convenient shorthand
Definition at line 123 of file WaypointEngine.h.
Constructor & Destructor Documentation
| WaypointEngine::WaypointEngine | ( | ) |
constructor
Definition at line 127 of file WaypointEngine.h.
| WaypointEngine::WaypointEngine | ( | char * | f | ) |
constructor
Definition at line 133 of file WaypointEngine.h.
Member Function Documentation
| virtual void WaypointEngine::addAbsoluteArc | ( | float | x, | |
| float | y, | |||
| float | angle, | |||
| bool | angleIsRelative, | |||
| float | speed, | |||
| float | arc | |||
| ) | [virtual] |
adds a waypoint to the end of the list, using an arcing path to get there, allows you to specify absolute locations to specify the focus of the arc
If you would rather specify the ending point and then "bow" the path, try addAbsoluteWaypoint() followed by setting the Waypoint::arc field directly
- Parameters:
-
x position along x of the center of the circle of the arc y position along y of the center of the circle of the arc angle angle of attack to use on the path angleIsRelative controls interpretation of angle; true means angle specifies an offset from the bearing of the target waypoint, false means maintain an absolute heading speed is the speed to move at; millimeters per second arc is the number of radians the arc fills; arcs near 0 (or multiples of 360) may cause numeric instability
Definition at line 246 of file WaypointEngine.h.
Referenced by loadBuffer().
| virtual void WaypointEngine::addAbsoluteWaypoint | ( | float | x, | |
| float | y, | |||
| float | angle, | |||
| bool | angleIsRelative, | |||
| float | fwdSpeed, | |||
| float | turnSpeed = -1.f | |||
| ) | [virtual] |
adds a waypoint to the end of the list, allows you to set locations relative to the world coordinate frame
- Parameters:
-
x position along x axis of the waypoint y position along y axis of the waypoint angle angle of attack to use on the path angleIsRelative controls interpretation of angle; true means angle specifies an offset from the bearing of the target waypoint, false means maintain an absolute heading fwdSpeed is the speed to move at; milimeters per second turnSpeed is the speed to turn; radians per second
Definition at line 207 of file WaypointEngine.h.
Referenced by addAbsoluteArc(), and loadBuffer().
| virtual void WaypointEngine::addEgocentricArc | ( | float | forward, | |
| float | left, | |||
| float | angle, | |||
| bool | angleIsRelative, | |||
| float | speed, | |||
| float | arc | |||
| ) | [virtual] |
adds a waypoint to the end of the list, using an arcing path to get there, allows you to specify turtle-style instructions to specify the focus of the arc
If you would rather specify the ending point and then "bow" the path, try addEgocentricWaypoint() followed by setting the Waypoint::arc field directly
- Parameters:
-
forward distance in front of the center of the circle of the arc left distance to the left of the center of the circle of the arc angle angle of attack to use on the path angleIsRelative controls interpretation of angle; true means angle specifies an offset from the bearing of the target waypoint, false means maintain an absolute heading speed is the speed to move at; millimeters per second arc is the number of radians the arc fills; arcs near 0 (or multiples of 360) may cause numeric instability
Definition at line 220 of file WaypointEngine.h.
Referenced by loadBuffer().
| void WaypointEngine::addEgocentricWaypoint | ( | float | forward, | |
| float | left, | |||
| float | angle, | |||
| bool | angleIsRelative, | |||
| float | fwdSpeed, | |||
| float | turnSpeed = -1.f | |||
| ) | [virtual] |
adds a waypoint to the end of the list, allows you to specify turtle-style instructions
- Parameters:
-
forward distance forward to move (negative to move backward of course) left distance to the left to move (negative to move right of course) angle angle of attack to use on the path angleIsRelative controls interpretation of angle; true means angle specifies an offset from the bearing of the target waypoint, false means maintain an absolute heading fwdSpeed is the speed to move at; millimeters per second turnSpeed is the speed to turn; radians per second
Definition at line 89 of file WaypointEngine.cc.
Referenced by addEgocentricArc(), and loadBuffer().
| virtual void WaypointEngine::addOffsetArc | ( | float | x, | |
| float | y, | |||
| float | angle, | |||
| bool | angleIsRelative, | |||
| float | speed, | |||
| float | arc | |||
| ) | [virtual] |
adds a waypoint to the end of the list, using an arcing path to get there, allows you to specify locations relative to previous waypoint to specify the focus of the arc
If you would rather specify the ending point and then "bow" the path, try addOffsetWaypoint() followed by setting the Waypoint::arc field directly
- Parameters:
-
x distance delta along x of the center of the circle of the arc y distance delta along y of the center of the circle of the arc angle angle of attack to use on the path angleIsRelative controls interpretation of angle; true means angle specifies an offset from the bearing of the target waypoint, false means maintain an absolute heading speed is the speed to move at; millimeters per second arc is the number of radians the arc fills; arcs near 0 (or multiples of 360) may cause numeric instability
Definition at line 233 of file WaypointEngine.h.
Referenced by loadBuffer().
| virtual void WaypointEngine::addOffsetWaypoint | ( | float | x, | |
| float | y, | |||
| float | angle, | |||
| bool | angleIsRelative, | |||
| float | fwdSpeed, | |||
| float | turnSpeed = -1.f | |||
| ) | [virtual] |
adds a waypoint to the end of the list, allows you to set locations relative to the location of the previous waypoint (or starting position)
- Parameters:
-
x distance delta along x axis of the waypoint y distance delta along y axis of the waypoint angle angle of attack to use on the path angleIsRelative controls interpretation of angle; true means angle specifies an offset from the bearing of the target waypoint, false means maintain an absolute heading fwdSpeed is the speed to move at; millimeters per second turnSpeed is the speed to turn; radians per second
Definition at line 196 of file WaypointEngine.h.
Referenced by addOffsetArc(), and loadBuffer().
| virtual void WaypointEngine::appendWaypoints | ( | const WaypointList_t | wpl | ) | [virtual] |
adds a waypoint to the end of the list, allows you to specify turtle-style instructions
- Parameters:
-
forward distance forward to move (negative to move backward of course) left distance to the left to move (negative to move right of course) angle angle of attack to use on the path angleIsRelative controls interpretation of angle; true means angle specifies an offset from the bearing of the target waypoint, false means maintain an absolute heading fwdSpeed is the speed to move at; millimeters per second turnSpeed is the speed to turn; radians per second
Definition at line 251 of file WaypointEngine.h.
| Waypoint WaypointEngine::calcAbsoluteCoords | ( | WaypointListIter_t | it, | |
| float | sx, | |||
| float | sy, | |||
| float | sa | |||
| ) |
starts at (sx, sy, heading=sa) and then applies all the waypoints up through it and returns result as an absolute position (angle field stores heading)
This is replicated in WaypointList, so any updates should be made there as well
Definition at line 287 of file WaypointEngine.h.
| Waypoint WaypointEngine::calcAbsoluteCoords | ( | WaypointListIter_t | it | ) |
if it follows the current waypoint, applies all the waypoints between curWaypoint and it and returns result as an absolute position (angle field stores heading); otherwise calls the other calcAbsoluteCoords(WaypointListIter_t, float, float, float)
Definition at line 264 of file WaypointEngine.h.
Referenced by fixArc(), and setTargetWaypoint().
| void WaypointEngine::checkNextWaypoint | ( | unsigned int | t | ) | [protected] |
checks to see if curPos is within eps of targetPos; if so, setTargetWaypoint() to next waypoint
Definition at line 364 of file WaypointEngine.cc.
Referenced by cycle().
| virtual void WaypointEngine::clearWaypointList | ( | ) | [virtual] |
adds a waypoint to the end of the list, allows you to specify turtle-style instructions
- Parameters:
-
forward distance forward to move (negative to move backward of course) left distance to the left to move (negative to move right of course) angle angle of attack to use on the path angleIsRelative controls interpretation of angle; true means angle specifies an offset from the bearing of the target waypoint, false means maintain an absolute heading fwdSpeed is the speed to move at; millimeters per second turnSpeed is the speed to turn; radians per second
Definition at line 255 of file WaypointEngine.h.
| void WaypointEngine::computeCurrentPosition | ( | unsigned int | t | ) | [protected] |
based on current velocity and time since last call, dead reckons current location in curPos
doesn't take acceleration into account, but should... :(
Definition at line 346 of file WaypointEngine.cc.
Referenced by cycle().
| void WaypointEngine::computeIdeal | ( | unsigned int | t | ) | [protected] |
computes the ideal location (idealPos) if we were following the intended path at the intended speed
Definition at line 373 of file WaypointEngine.cc.
Referenced by cycle().
| void WaypointEngine::computeNewVelocity | ( | unsigned int | t | ) | [protected] |
computes the velocity which should be used given the current position (curPos) relative to the ideal position (idealPos)
Definition at line 443 of file WaypointEngine.cc.
Referenced by cycle().
| bool WaypointEngine::cycle | ( | ) | [virtual] |
call this on each opportunity to check current location and correct velocities
- Returns:
- isRunning for convenience of checking if anything is happening
Definition at line 36 of file WaypointEngine.cc.
| void WaypointEngine::fixArc | ( | float | arc | ) | [protected] |
assumes the last waypoint is actually center of circle, adjusts it to be the endpoint of following arc radians around that circle instead
This is replicated in WaypointList, so any updates should be made there as well
Definition at line 324 of file WaypointEngine.cc.
Referenced by addAbsoluteArc(), addEgocentricArc(), and addOffsetArc().
Definition at line 81 of file WaypointEngine.cc.
Referenced by addEgocentricWaypoint().
| unsigned int WaypointEngine::getBinSize | ( | ) | const [virtual] |
returns a rough overestimate of the size needed
pretends we need to switch max_turn_speed and track_path on every point, and the longest options are given for every point
Implements LoadSave.
Definition at line 144 of file WaypointEngine.cc.
| virtual float WaypointEngine::getCurA | ( | ) | const [virtual] |
returns current heading
Definition at line 162 of file WaypointEngine.h.
| virtual WaypointListIter_t WaypointEngine::getCurWaypointID | ( | ) | const [virtual] |
returns id value of current waypoint (curWaypoint)
Definition at line 158 of file WaypointEngine.h.
| virtual float WaypointEngine::getCurX | ( | ) | const [virtual] |
returns current x position
Definition at line 160 of file WaypointEngine.h.
| virtual float WaypointEngine::getCurY | ( | ) | const [virtual] |
returns current y position
Definition at line 161 of file WaypointEngine.h.
| virtual bool WaypointEngine::getIsLooping | ( | ) | const [virtual] |
returns isLooping
Definition at line 153 of file WaypointEngine.h.
| virtual bool WaypointEngine::getTracking | ( | ) | const [virtual] |
returns isTracking
Definition at line 169 of file WaypointEngine.h.
| virtual const WaypointList_t& WaypointEngine::getWaypointList | ( | ) | const [virtual] |
returns a const reference to waypoints
Definition at line 156 of file WaypointEngine.h.
| virtual WaypointList_t& WaypointEngine::getWaypointList | ( | ) | [virtual] |
returns a reference to waypoints
Definition at line 155 of file WaypointEngine.h.
| void WaypointEngine::go | ( | ) | [virtual] |
starts walking towards the first waypoint
Definition at line 4 of file WaypointEngine.cc.
Referenced by unpause().
| void WaypointEngine::init | ( | ) | [protected] |
basic memory initialization
Definition at line 314 of file WaypointEngine.cc.
Referenced by WaypointEngine().
| unsigned int WaypointEngine::loadBuffer | ( | const char | buf[], | |
| unsigned int | len, | |||
| const char * | filename = NULL | |||
| ) | [virtual] |
Load from a saved buffer in memory.
- Parameters:
-
buf pointer to the memory where you should begin loading len length of buf available (this isn't necessarily all yours, there might be other things following your data)
- Returns:
- the number of bytes actually used
Implements LoadSave.
Definition at line 157 of file WaypointEngine.cc.
| virtual unsigned int WaypointEngine::loadFile | ( | const char * | filename | ) | [virtual] |
initiate opening of the specified file and loading/saving of all appropriate information.
- Parameters:
-
filename the file to load/save
- Returns:
- number of bytes read/written, 0 if error (or empty)
Reimplemented from LoadSave.
Definition at line 145 of file WaypointEngine.h.
Referenced by WaypointEngine().
| void WaypointEngine::pause | ( | ) | [virtual] |
halts execution of waypoint list
Definition at line 22 of file WaypointEngine.cc.
| unsigned int WaypointEngine::saveBuffer | ( | char | buf[], | |
| unsigned int | len | |||
| ) | const [virtual] |
Save to a given buffer in memory.
- Parameters:
-
buf pointer to the memory where you should begin writing len length of buf available. (this isn't necessarily all yours, constrain yourself to what you returned in getBinSize() )
- Returns:
- the number of bytes actually used
Implements LoadSave.
Definition at line 265 of file WaypointEngine.cc.
| virtual unsigned int WaypointEngine::saveFile | ( | const char * | filename | ) | const [virtual] |
initiate opening of the specified file and loading/saving of all appropriate information.
- Parameters:
-
filename the file to load/save
- Returns:
- number of bytes read/written, 0 if error (or empty)
Reimplemented from LoadSave.
Definition at line 146 of file WaypointEngine.h.
sets the current position (for instance your localization module has an update)
Definition at line 164 of file WaypointEngine.h.
| virtual void WaypointEngine::setIsLooping | ( | bool | isl | ) | [virtual] |
sets isLooping
Definition at line 152 of file WaypointEngine.h.
| void WaypointEngine::setTargetWaypoint | ( | WaypointListIter_t | iter | ) | [virtual] |
will set the currently active waypoint to another waypoint; correctly calculates location of intermediate waypoints so target location will be the same as if the intervening waypoints had actually been executed
Definition at line 94 of file WaypointEngine.cc.
Referenced by checkNextWaypoint(), and go().
| virtual void WaypointEngine::setTracking | ( | bool | b | ) | [virtual] |
sets the isTracking flag, only affects future waypoints which are added, not currently listed waypoints (use getWaypointList() to modify existing waypoints)
Definition at line 168 of file WaypointEngine.h.
Definition at line 54 of file WaypointEngine.cc.
Referenced by fudgedAngle().
| void WaypointEngine::unpause | ( | ) | [virtual] |
resumes execution of waypoint list from last paused location
Definition at line 27 of file WaypointEngine.cc.
Member Data Documentation
float WaypointEngine::arcRadius [protected] |
radius of current arc, may be inf or NaN if using a straight line; can also be negative depending on direction!
Definition at line 326 of file WaypointEngine.h.
Referenced by computeIdeal(), computeNewVelocity(), and setTargetWaypoint().
float WaypointEngine::curPos[3] [protected] |
current position of the robot relative to the origin
Definition at line 332 of file WaypointEngine.h.
Referenced by checkNextWaypoint(), computeCurrentPosition(), computeIdeal(), computeNewVelocity(), getCurA(), getCurX(), getCurY(), go(), init(), setCurPos(), and setTargetWaypoint().
float WaypointEngine::curVel[3] [protected] |
current velocity
Definition at line 333 of file WaypointEngine.h.
Referenced by computeCurrentPosition(), computeNewVelocity(), go(), init(), setTargetWaypoint(), and unpause().
WaypointListIter_t WaypointEngine::curWaypoint [protected] |
index of current waypoint
Definition at line 322 of file WaypointEngine.h.
Referenced by calcAbsoluteCoords(), checkNextWaypoint(), cycle(), getCurWaypointID(), go(), setTargetWaypoint(), and unpause().
float WaypointEngine::defaultTurnSpeed [protected] |
maximum turning speed for new waypoints
Definition at line 336 of file WaypointEngine.h.
Referenced by addAbsoluteWaypoint(), addEgocentricWaypoint(), addOffsetWaypoint(), calcAbsoluteCoords(), go(), and loadBuffer().
float WaypointEngine::eps[3] [protected] |
epsilon - "close enough" to register a hit on the waypoint
Definition at line 334 of file WaypointEngine.h.
Referenced by calcAbsoluteCoords(), checkNextWaypoint(), computeIdeal(), go(), and init().
float WaypointEngine::idealPos[4] [protected] |
ideal position of the robot relative to the origin, (x, y, heading, last element is desired direction of motion)
Definition at line 331 of file WaypointEngine.h.
Referenced by computeIdeal(), computeNewVelocity(), and init().
bool WaypointEngine::isLooping [protected] |
true if we should loop when done
Definition at line 320 of file WaypointEngine.h.
Referenced by getIsLooping(), setIsLooping(), and setTargetWaypoint().
bool WaypointEngine::isRunning [protected] |
true if we're currently executing the path
Definition at line 319 of file WaypointEngine.h.
Referenced by cycle(), go(), pause(), setTargetWaypoint(), and unpause().
bool WaypointEngine::isTracking [protected] |
new waypoints will use trackPath mode
Definition at line 321 of file WaypointEngine.h.
Referenced by addAbsoluteWaypoint(), addEgocentricWaypoint(), addOffsetWaypoint(), calcAbsoluteCoords(), getTracking(), go(), loadBuffer(), and setTracking().
unsigned int WaypointEngine::lastUpdateTime [protected] |
time we last updated curPos
Definition at line 327 of file WaypointEngine.h.
Referenced by computeCurrentPosition(), go(), and unpause().
float WaypointEngine::pathLength [protected] |
distance to be traveled from sourcePos to targetPos (may differ from waypointDistance due to arcing)
Definition at line 325 of file WaypointEngine.h.
Referenced by computeIdeal(), and setTargetWaypoint().
float WaypointEngine::pathStartPos[3] [protected] |
position when started execution of current path (aka origin offset for relative positions which preceed an absolute waypoint)
Definition at line 328 of file WaypointEngine.h.
Referenced by calcAbsoluteCoords(), fixArc(), go(), init(), and setTargetWaypoint().
float WaypointEngine::Pcorr [protected] |
proportional correction factor for tracking path
Definition at line 335 of file WaypointEngine.h.
Referenced by computeNewVelocity().
float WaypointEngine::sourcePos[3] [protected] |
source position of the robot relative to the origin, aka absolute position of previous waypoint
Definition at line 329 of file WaypointEngine.h.
Referenced by computeIdeal(), go(), init(), and setTargetWaypoint().
float WaypointEngine::targetPos[3] [protected] |
target position of the robot relative to the origin, aka absolute position of next waypoint
Definition at line 330 of file WaypointEngine.h.
Referenced by calcAbsoluteCoords(), checkNextWaypoint(), computeIdeal(), computeNewVelocity(), go(), init(), and setTargetWaypoint().
float WaypointEngine::waypointDistance [protected] |
distance from sourcePos to targetPos
Definition at line 324 of file WaypointEngine.h.
Referenced by setTargetWaypoint().
WaypointList_t WaypointEngine::waypoints [protected] |
storage for the waypoints
Definition at line 317 of file WaypointEngine.h.
Referenced by addAbsoluteWaypoint(), addEgocentricWaypoint(), addOffsetWaypoint(), appendWaypoints(), calcAbsoluteCoords(), clearWaypointList(), cycle(), fixArc(), getBinSize(), getWaypointList(), go(), loadBuffer(), saveBuffer(), setTargetWaypoint(), and unpause().
unsigned int WaypointEngine::waypointTime [protected] |
time we started working on current waypoint
Definition at line 323 of file WaypointEngine.h.
Referenced by computeIdeal(), and setTargetWaypoint().
The documentation for this class was generated from the following files: