HolonomicMotionModel.h File Reference
Defines HolonomicMotionModel, which can model the path of a holonomic robot. More...
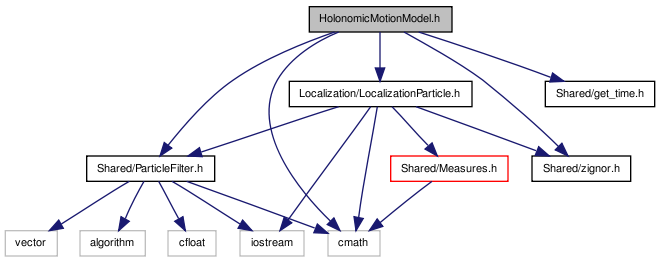
#include "Shared/ParticleFilter.h"#include "Localization/LocalizationParticle.h"#include "Shared/get_time.h"#include "Shared/zignor.h"#include <cmath>
Include dependency graph for HolonomicMotionModel.h:
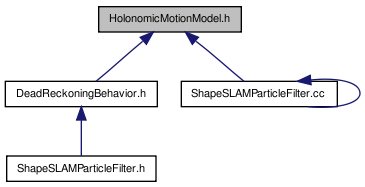
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | HolonomicMotionModel< ParticleT > |
| This class can model the path of a holonomic robot in two dimensions (x and y). More... | |
Functions | |
| void | computeHolonomicMotion (float xvel, float yvel, float avel, float time, float &xpos, float &ypos, float &apos) |
| the main function -- to avoid numeric issues, treats paths that would result in a radius over 1e6 long as a straight line | |
Detailed Description
Defines HolonomicMotionModel, which can model the path of a holonomic robot.
Definition in file HolonomicMotionModel.h.
Function Documentation
| void computeHolonomicMotion | ( | float | xvel, | |
| float | yvel, | |||
| float | avel, | |||
| float | time, | |||
| float & | xpos, | |||
| float & | ypos, | |||
| float & | apos | |||
| ) |
the main function -- to avoid numeric issues, treats paths that would result in a radius over 1e6 long as a straight line
see HolonomicMotionModel class notes for more information on the math involved
Definition at line 3 of file HolonomicMotionModel.cc.
Referenced by HolonomicMotionModel< ParticleT >::getPosition(), HolonomicMotionModel< ParticleT >::setVelocity(), and HolonomicMotionModel< ParticleT >::updateMotion().