KinematicJoint.cc File Reference
Implements KinematicJoint, which manages parameters defining the position and type of motion produced by an actuator (i.e. forward kinematics). More...
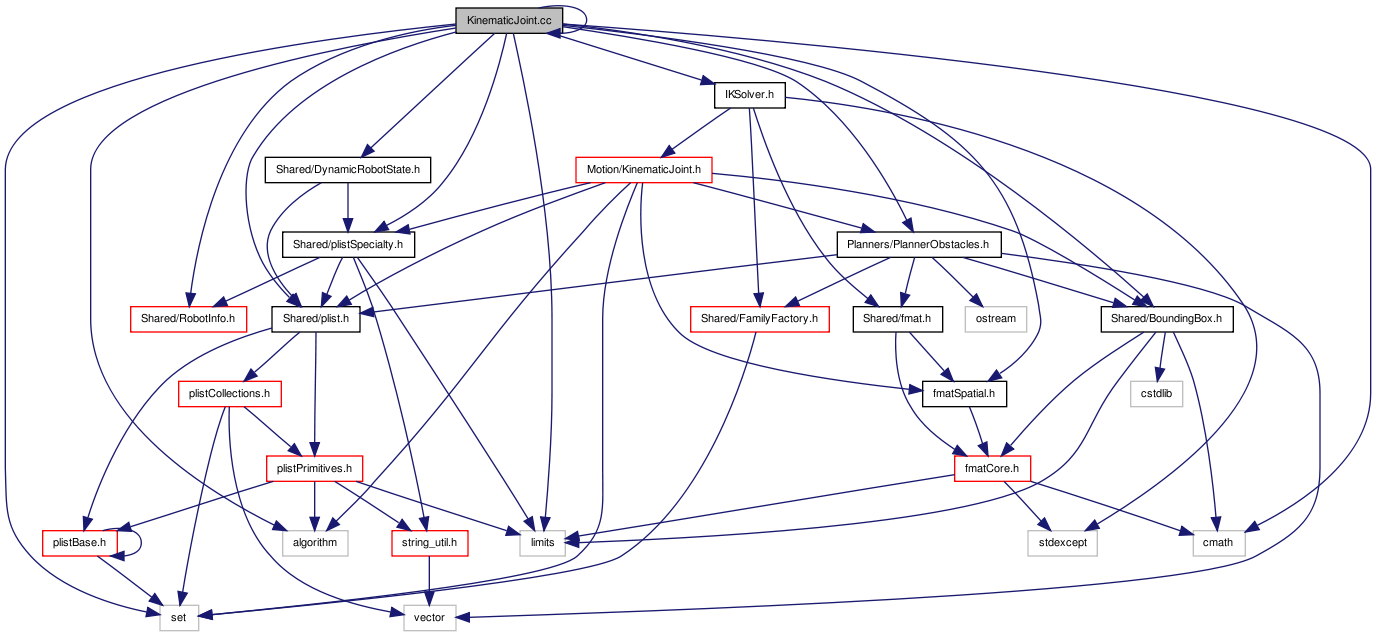
#include "KinematicJoint.h"#include "Shared/plist.h"#include "Shared/plistSpecialty.h"#include "Shared/DynamicRobotState.h"#include "Shared/fmatSpatial.h"#include "Shared/BoundingBox.h"#include "Planners/PlannerObstacles.h"#include <set>#include <algorithm>#include "IKSolver.h"#include "Shared/RobotInfo.h"#include <cmath>#include <limits>
Include dependency graph for KinematicJoint.cc:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Functions | |
| INSTANTIATE_NAMEDENUMERATION_STATICS (KinematicJoint::JointType_t) | |
Detailed Description
Implements KinematicJoint, which manages parameters defining the position and type of motion produced by an actuator (i.e. forward kinematics).
Definition in file KinematicJoint.cc.
Function Documentation
| INSTANTIATE_NAMEDENUMERATION_STATICS | ( | KinematicJoint::JointType_t | ) |