SensorInfo.h File Reference
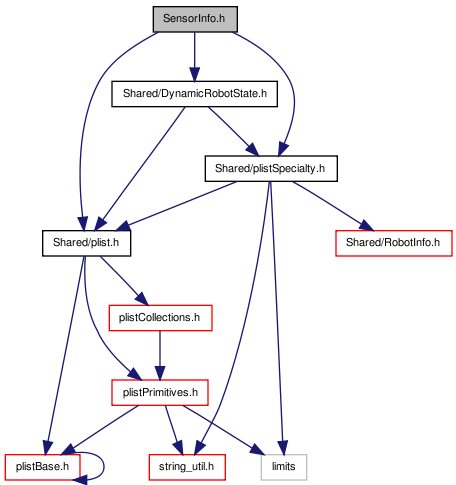
#include "Shared/plist.h"#include "Shared/plistSpecialty.h"#include "Shared/DynamicRobotState.h"
Include dependency graph for SensorInfo.h:
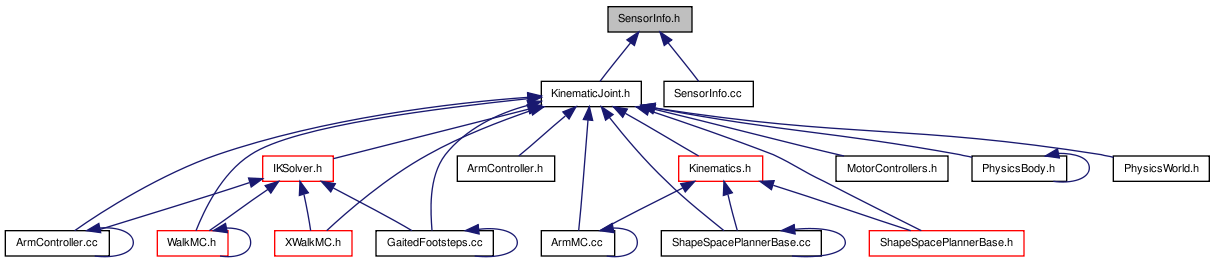
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | SensorInfo |
| Base class for sensor descriptions, actual subclass name stored in sensorType. More... | |
| struct | SensorRangeFinder |
| Configures a sensor to take range measurements. More... | |
| struct | SensorContact |
| Sets value to 1 if there are any contact constraints within the specified region of the associated body; 0 otherwise. More... | |
| struct | SensorFeedback |
| Sets value to the current joint position. This is created automatically by Mirage for named joints where min≠max, so typically you don't need to explicitly request this sensor. More... | |
| struct | GPSSensor |
| struct | OdometrySensor |
| Odometry is presently only used for the Create robot, which reports cumulative distances and angles. More... | |
Namespaces | |
| namespace | plist |
A collection of classes to implement the Propery List data storage format, a XML standard used by Apple and others. | |
Functions | |
| template<> | |
| SensorInfo * | plist::loadXML (xmlNode *node) |
| This specialization looks for the SensorInfo::sensorType, then has the factory construct the correct subtype before loading the node into and returning that. | |
| template<> | |
| SensorInfo * | plist::allocate () |
| SensorInfo::sensorType.set() could still lead to trouble, although with a little work we could probably find a way to support it... | |
Detailed Description
Definition in file SensorInfo.h.