ShapeSpacePlannerXY.h File Reference
#include "Planners/RRT/ShapeSpacePlannerBase.h"
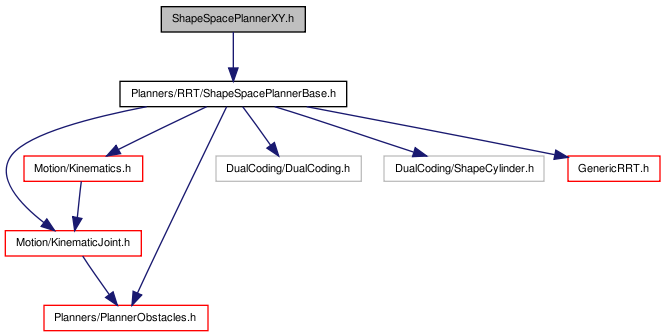
Include dependency graph for ShapeSpacePlannerXY.h:
Go to the source code of this file.
Classes | |
| class | RRTNodeXY |
| class | RRTNodeXY::CollisionChecker |
| Collision checker to be called by RRT search algorithm. More... | |
| class | ShapeSpacePlannerXY |
| Plans a path in a 2D linear space, assuming the robot has circular shape. More... | |