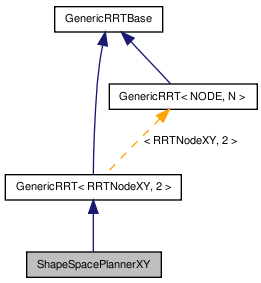
ShapeSpacePlannerXY Class Reference
Plans a path in a 2D linear space, assuming the robot has circular shape. More...
#include <ShapeSpacePlannerXY.h>
Detailed Description
Plans a path in a 2D linear space, assuming the robot has circular shape.
Definition at line 51 of file ShapeSpacePlannerXY.h.
Public Types | |
| typedef RRTNodeXY | NodeType_t |
| typedef NodeType_t::NodeValue_t | NodeValue_t |
| typedef GenericRRTBase::PlannerResult< 2 > | PlannerResult |
Public Member Functions | |
| ShapeSpacePlannerXY (DualCoding::ShapeSpace &shs, const DualCoding::Shape< DualCoding::PolygonData > &worldBounds=Shape< PolygonData >(), float inflation=0, float _robotRadius=6 *25.4f) | |
| virtual | ~ShapeSpacePlannerXY () |
| PlannerResult | planPath (const Point &start, const Point &end, unsigned int _maxIterations=4000, std::vector< NodeValue_t > *pathResult=NULL, std::vector< NodeType_t > *treeStartResult=NULL, std::vector< NodeType_t > *treeEndResult=NULL) |
Static Public Member Functions | |
| static void | plotPath (const std::vector< NodeValue_t > &path, Shape< GraphicsData > &graphics, rgb color=rgb(0, 0, 255)) |
| static void | plotTree (const std::vector< NodeType_t > &tree, Shape< GraphicsData > &graphics, rgb color=rgb(0, 0, 255)) |
Public Attributes | |
| float | robotRadius |
| radius in mm of the CircularObstacle describing the robot | |
Member Typedef Documentation
Definition at line 53 of file ShapeSpacePlannerXY.h.
Reimplemented from GenericRRT< RRTNodeXY, 2 >.
Definition at line 54 of file ShapeSpacePlannerXY.h.
Definition at line 55 of file ShapeSpacePlannerXY.h.
Constructor & Destructor Documentation
| ShapeSpacePlannerXY::ShapeSpacePlannerXY | ( | DualCoding::ShapeSpace & | shs, | |
| const DualCoding::Shape< DualCoding::PolygonData > & | worldBounds = Shape< PolygonData >(), |
|||
| float | inflation = 0, |
|||
| float | _robotRadius = 6 *25.4f | |||
| ) |
| virtual ShapeSpacePlannerXY::~ShapeSpacePlannerXY | ( | ) | [virtual] |
Definition at line 61 of file ShapeSpacePlannerXY.h.
Member Function Documentation
| ShapeSpacePlannerXY::PlannerResult ShapeSpacePlannerXY::planPath | ( | const Point & | start, | |
| const Point & | end, | |||
| unsigned int | _maxIterations = 4000, |
|||
| std::vector< NodeValue_t > * | pathResult = NULL, |
|||
| std::vector< NodeType_t > * | treeStartResult = NULL, |
|||
| std::vector< NodeType_t > * | treeEndResult = NULL | |||
| ) |
Definition at line 99 of file ShapeSpacePlannerXY.cc.
| void ShapeSpacePlannerXY::plotPath | ( | const std::vector< NodeValue_t > & | path, | |
| Shape< GraphicsData > & | graphics, | |||
| rgb | color = rgb(0,0,255) | |||
| ) | [static] |
Definition at line 129 of file ShapeSpacePlannerXY.cc.
| void ShapeSpacePlannerXY::plotTree | ( | const std::vector< NodeType_t > & | tree, | |
| Shape< GraphicsData > & | graphics, | |||
| rgb | color = rgb(0,0,255) | |||
| ) | [static] |
Definition at line 136 of file ShapeSpacePlannerXY.cc.
Member Data Documentation
radius in mm of the CircularObstacle describing the robot
Definition at line 72 of file ShapeSpacePlannerXY.h.
Referenced by planPath().
The documentation for this class was generated from the following files: