UPennWalkMC.cc File Reference
Defines UPennWalkMC, which uses the UPennalizers' 2004 RoboCup code to compute walking gaits. More...
#include "UPennWalkMC.h"#include "Motion/MotionCommand.h"#include "Motion/MotionManager.h"#include <math.h>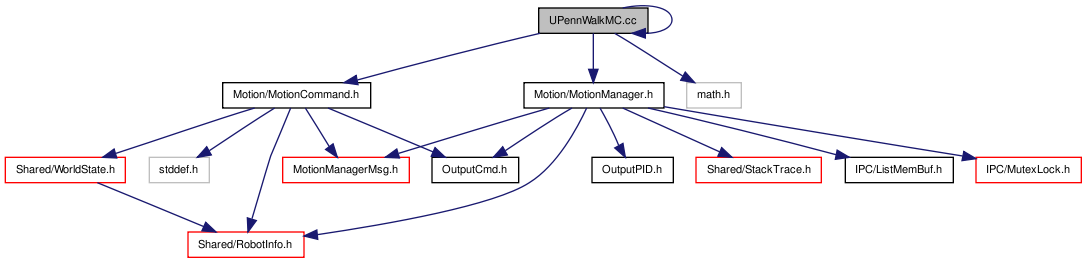

Go to the source code of this file.
Defines | |
| #define | PI M_PI |
Enumerations | |
| enum | LegIdentifier { LEG_LEFT_FORE = 0, LEG_LEFT_HIND = 1, LEG_RIGHT_FORE = 2, LEG_RIGHT_HIND = 3 } |
Variables | |
| const size_t | MAX_WIDTH = 208 |
| const size_t | MAX_HEIGHT = 160 |
| const size_t | LAYERM_WIDTH = 104 |
| const size_t | LAYERM_HEIGHT = 80 |
| const double | FIELD_VIEW_H = 56.9*(PI/180) |
| const double | FIELD_VIEW_V = 45.2*(PI/180) |
| const double | FOCAL_LENGTH = 192.0 |
| const unsigned int | IMAGE_WIDTH = 208 |
| const unsigned int | IMAGE_HEIGHT = 160 |
| const double | BODY_TILT = -13*PI/180 |
| const double | BODY_WIDTH = 134.4 |
| const double | BODY_LENGTH = 130.0 |
| const size_t | NUM_LEG = 4 |
| const size_t | NUM_LEG_JOINT = 3*NUM_LEG |
| const double | LEG_FORE_UPPER_Z = 69.5 |
| const double | LEG_FORE_UPPER_Y = 9.0 |
| const double | LEG_FORE_LOWER_Z = 76.4 |
| const double | LEG_FORE_LOWER_Y = -9.0 |
| const double | LEG_HIND_UPPER_Z = 69.5 |
| const double | LEG_HIND_UPPER_Y = 9.0 |
| const double | LEG_HIND_LOWER_Z = 78.9 |
| const double | LEG_HIND_LOWER_Y = -9.0 |
| const double | NECK_TILT2_TO_CAMERA_Y = 81.0 |
| const double | NECK_TILT2_TO_CAMERA_Z = -14.6 |
| const double | NECK_TILT_TO_TILT2 = 80.0 |
| const double | SHOULDER_TO_NECK_TILT_Y = 2.5 |
| const double | SHOULDER_TO_NECK_TILT_Z = 19.5 |
| const double | MIN_SHOULDER_HEIGHT = 50.0 |
| const double | TURN_OFFSET = 75.0 |
| const double | STANCE_BODY_TILT = 0*PI/180 |
| const double | STANCE_SHOULDER_HEIGHT = 105. |
| const double | STANCE_FORE_X0 = 7. |
| const double | STANCE_FORE_Y0 = 60. |
| const double | STANCE_HIND_X0 = 2. |
| const double | STANCE_HIND_Y0 = -45. |
| const int | WALK_QUARTER_PERIOD = 3 |
| const double | WALK_MAX_DISTANCE = 13. |
| const double | WALK_FORE_LIFT_INITIAL = 25 |
| const double | WALK_FORE_LIFT_FINAL = 45 |
| const double | WALK_HIND_LIFT_INITIAL = 25 |
| const double | WALK_HIND_LIFT_FINAL = 25 |
| const double | WALK_FORE_XMIN = -10 |
| const double | WALK_FORE_XMAX = 30 |
| const double | WALK_FORE_YMIN = 25 |
| const double | WALK_FORE_YMAX = 90 |
| const double | WALK_HIND_XMIN = -15 |
| const double | WALK_HIND_XMAX = 35 |
| const double | WALK_HIND_YMIN = -70 |
| const double | WALK_HIND_YMAX = -15 |
Detailed Description
Defines UPennWalkMC, which uses the UPennalizers' 2004 RoboCup code to compute walking gaits.
The UPennalizers code was released under the GPL:
-------------------------------------------------------------------------
This software is distributed under the GNU General Public License,
version 2. If you do not have a copy of this licence, visit
www.gnu.org, or write: Free Software Foundation, 59 Temple Place,
Suite 330 Boston, MA 02111-1307 USA. This program is distributed
in the hope that it will be useful, but WITHOUT ANY WARRANTY,
including MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE.
-------------------------------------------------------------------------
Definition in file UPennWalkMC.cc.
Define Documentation
| #define PI M_PI |
Definition at line 19 of file UPennWalkMC.cc.
Referenced by UPennWalkMC::LegPositionsToAngles().
Enumeration Type Documentation
| enum LegIdentifier |
Definition at line 131 of file UPennWalkMC.cc.
Variable Documentation
| const double BODY_LENGTH = 130.0 |
Definition at line 36 of file UPennWalkMC.cc.
Referenced by UPennWalkMC::LegPositionsToAngles(), and UPennWalkMC::WalkLegs().
| const double BODY_TILT = -13*PI/180 |
Definition at line 33 of file UPennWalkMC.cc.
| const double BODY_WIDTH = 134.4 |
Definition at line 35 of file UPennWalkMC.cc.
Referenced by UPennWalkMC::WalkLegs().
| const double FIELD_VIEW_H = 56.9*(PI/180) |
Definition at line 27 of file UPennWalkMC.cc.
| const double FIELD_VIEW_V = 45.2*(PI/180) |
Definition at line 28 of file UPennWalkMC.cc.
| const double FOCAL_LENGTH = 192.0 |
Definition at line 29 of file UPennWalkMC.cc.
| const unsigned int IMAGE_HEIGHT = 160 |
Definition at line 31 of file UPennWalkMC.cc.
| const unsigned int IMAGE_WIDTH = 208 |
Definition at line 30 of file UPennWalkMC.cc.
| const size_t LAYERM_HEIGHT = 80 |
Definition at line 25 of file UPennWalkMC.cc.
| const size_t LAYERM_WIDTH = 104 |
Definition at line 24 of file UPennWalkMC.cc.
| const double LEG_FORE_LOWER_Y = -9.0 |
Definition at line 45 of file UPennWalkMC.cc.
Referenced by UPennWalkMC::LegPositionsToAngles().
| const double LEG_FORE_LOWER_Z = 76.4 |
Definition at line 44 of file UPennWalkMC.cc.
Referenced by UPennWalkMC::LegPositionsToAngles().
| const double LEG_FORE_UPPER_Y = 9.0 |
Definition at line 43 of file UPennWalkMC.cc.
Referenced by UPennWalkMC::LegPositionsToAngles().
| const double LEG_FORE_UPPER_Z = 69.5 |
Definition at line 42 of file UPennWalkMC.cc.
Referenced by UPennWalkMC::LegPositionsToAngles().
| const double LEG_HIND_LOWER_Y = -9.0 |
Definition at line 50 of file UPennWalkMC.cc.
Referenced by UPennWalkMC::LegPositionsToAngles().
| const double LEG_HIND_LOWER_Z = 78.9 |
Definition at line 49 of file UPennWalkMC.cc.
Referenced by UPennWalkMC::LegPositionsToAngles().
| const double LEG_HIND_UPPER_Y = 9.0 |
Definition at line 48 of file UPennWalkMC.cc.
Referenced by UPennWalkMC::LegPositionsToAngles().
| const double LEG_HIND_UPPER_Z = 69.5 |
Definition at line 47 of file UPennWalkMC.cc.
Referenced by UPennWalkMC::LegPositionsToAngles().
| const size_t MAX_HEIGHT = 160 |
Definition at line 23 of file UPennWalkMC.cc.
| const size_t MAX_WIDTH = 208 |
Definition at line 22 of file UPennWalkMC.cc.
| const double MIN_SHOULDER_HEIGHT = 50.0 |
Definition at line 60 of file UPennWalkMC.cc.
| const double NECK_TILT2_TO_CAMERA_Y = 81.0 |
Definition at line 54 of file UPennWalkMC.cc.
| const double NECK_TILT2_TO_CAMERA_Z = -14.6 |
Definition at line 55 of file UPennWalkMC.cc.
| const double NECK_TILT_TO_TILT2 = 80.0 |
Definition at line 56 of file UPennWalkMC.cc.
| const size_t NUM_LEG = 4 |
Definition at line 38 of file UPennWalkMC.cc.
| const size_t NUM_LEG_JOINT = 3*NUM_LEG |
Definition at line 39 of file UPennWalkMC.cc.
Referenced by UPennWalkMC::StandLegs(), and UPennWalkMC::WalkLegs().
| const double SHOULDER_TO_NECK_TILT_Y = 2.5 |
Definition at line 57 of file UPennWalkMC.cc.
| const double SHOULDER_TO_NECK_TILT_Z = 19.5 |
Definition at line 58 of file UPennWalkMC.cc.
| const double STANCE_BODY_TILT = 0*PI/180 |
Definition at line 71 of file UPennWalkMC.cc.
| const double STANCE_FORE_X0 = 7. |
Definition at line 74 of file UPennWalkMC.cc.
| const double STANCE_FORE_Y0 = 60. |
Definition at line 76 of file UPennWalkMC.cc.
| const double STANCE_HIND_X0 = 2. |
Definition at line 77 of file UPennWalkMC.cc.
| const double STANCE_HIND_Y0 = -45. |
Definition at line 78 of file UPennWalkMC.cc.
| const double STANCE_SHOULDER_HEIGHT = 105. |
Definition at line 72 of file UPennWalkMC.cc.
| const double TURN_OFFSET = 75.0 |
Definition at line 62 of file UPennWalkMC.cc.
| const double WALK_FORE_LIFT_FINAL = 45 |
Definition at line 84 of file UPennWalkMC.cc.
| const double WALK_FORE_LIFT_INITIAL = 25 |
Definition at line 83 of file UPennWalkMC.cc.
| const double WALK_FORE_XMAX = 30 |
Definition at line 90 of file UPennWalkMC.cc.
| const double WALK_FORE_XMIN = -10 |
Definition at line 89 of file UPennWalkMC.cc.
| const double WALK_FORE_YMAX = 90 |
Definition at line 93 of file UPennWalkMC.cc.
| const double WALK_FORE_YMIN = 25 |
Definition at line 91 of file UPennWalkMC.cc.
| const double WALK_HIND_LIFT_FINAL = 25 |
Definition at line 87 of file UPennWalkMC.cc.
| const double WALK_HIND_LIFT_INITIAL = 25 |
Definition at line 86 of file UPennWalkMC.cc.
| const double WALK_HIND_XMAX = 35 |
Definition at line 96 of file UPennWalkMC.cc.
| const double WALK_HIND_XMIN = -15 |
Definition at line 95 of file UPennWalkMC.cc.
| const double WALK_HIND_YMAX = -15 |
Definition at line 98 of file UPennWalkMC.cc.
| const double WALK_HIND_YMIN = -70 |
Definition at line 97 of file UPennWalkMC.cc.
| const double WALK_MAX_DISTANCE = 13. |
Definition at line 81 of file UPennWalkMC.cc.
| const int WALK_QUARTER_PERIOD = 3 |
Definition at line 80 of file UPennWalkMC.cc.