WorldState.cc File Reference
Implements WorldState, maintains information about the robot's environment, namely sensors and power status. More...
#include "WorldState.h"#include "Shared/RobotInfo.h"#include "IPC/ProcessID.h"#include <vector>#include "Shared/get_time.h"#include "Events/EventRouter.h"#include "Events/EventBase.h"#include "ERS210Info.h"#include "ERS220Info.h"#include "ERS7Info.h"#include "Shared/Config.h"#include "local/DataSource.h"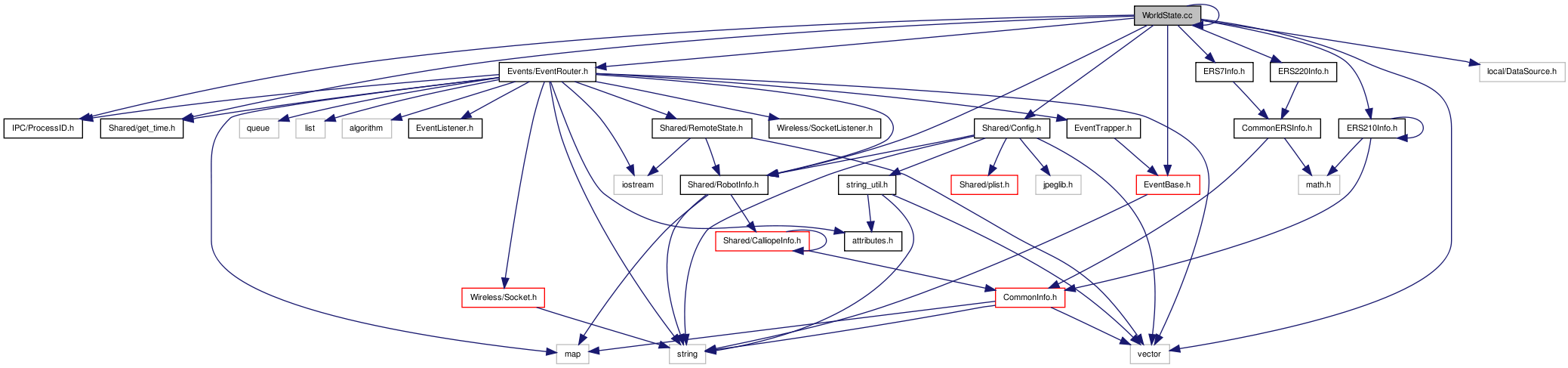

Go to the source code of this file.
Defines | |
| #define | GETD(cpc) (((float)sensor.GetData(cpc)->frame[lastFrame].value) / 1.0E6f) |
| returns value from OPEN-R, converted from micro in int to base in float | |
| #define | GETB(cpc) ((bool)sensor.GetData(cpc)->frame[lastFrame].value) |
| returns value from OPEN-R, as bool | |
| #define | GETSENSOR(cpc) ((float)sensor.GetData(cpc)->frame[lastFrame].value) |
| return value from OPEN-R, as int | |
| #define | GETSIG(cpc) ((word)sensor.GetData(cpc)->frame[lastFrame].signal) |
| returns signal from OPEN-R as word | |
| #define | GETDUTY(cpc) (((OJointValue*)(void*)&sensor.GetData(cpc)->frame[lastFrame])->pwmDuty/512.0f) |
| returns duty cycle from OPEN-R as float; -1 (full reverse) to 0 (idle) to 1 (full forward) | |
Variables | |
| WorldStateLookup | state |
| the global state object, points into a shared memory region, created by MainObject | |
Detailed Description
Implements WorldState, maintains information about the robot's environment, namely sensors and power status.
Definition in file WorldState.cc.
Define Documentation
| #define GETB | ( | cpc | ) | ((bool)sensor.GetData(cpc)->frame[lastFrame].value) |
returns value from OPEN-R, as bool
Definition at line 24 of file WorldState.cc.
| #define GETD | ( | cpc | ) | (((float)sensor.GetData(cpc)->frame[lastFrame].value) / 1.0E6f) |
returns value from OPEN-R, converted from micro in int to base in float
Definition at line 23 of file WorldState.cc.
| #define GETDUTY | ( | cpc | ) | (((OJointValue*)(void*)&sensor.GetData(cpc)->frame[lastFrame])->pwmDuty/512.0f) |
returns duty cycle from OPEN-R as float; -1 (full reverse) to 0 (idle) to 1 (full forward)
Definition at line 27 of file WorldState.cc.
| #define GETSENSOR | ( | cpc | ) | ((float)sensor.GetData(cpc)->frame[lastFrame].value) |
return value from OPEN-R, as int
Definition at line 25 of file WorldState.cc.
| #define GETSIG | ( | cpc | ) | ((word)sensor.GetData(cpc)->frame[lastFrame].signal) |
returns signal from OPEN-R as word
Definition at line 26 of file WorldState.cc.
Variable Documentation
the global state object, points into a shared memory region, created by MainObject
Definition at line 35 of file WorldState.cc.
Referenced by Wireless::blockingSend(), BatteryMonitorBehavior::calcFlipDelay(), Kinematics::calculateGroundPlane(), Wireless::connect(), ArmController::connect(), MotionManager::convertMotion(), Kodu::Parser::KodeCreator::createGrabKode(), WorldStateSerializerBehavior::doEvent(), RecordMotionNode::doEvent(), FlashIPAddrBehavior::doEvent(), BatteryMonitorBehavior::doEvent(), ArmController::doEvent(), Grasper::Verify::CheckGripperLoad::doStart(), DeadReckoningBehavior< ParticleT >::doStart(), EmergencyStopMC::freezeJoints(), CreateOdometry::getCreateOdometry(), WorldState::getCurrent(), ArmMC::getGripperLoad(), MotionManager::getOutputs(), ArmMC::incrementGrasp(), PostureMC::isAlive(), HeadPointerMC::isAlive(), ArmMC::isAlive(), Wireless::listen(), ArmController::pointPicked(), Wireless::pollProcess(), Wireless::pollSetup(), RecordMotionNode::preStart(), TorqueCalibrate::TakeMeasurementControl::processEvent(), SensorObserverControl::processEvent(), PostureEditor::processEvent(), PostureEditor::refresh(), Wireless::send(), CameraStreamBehavior::sendSensors(), EventProxy::sendState(), BatteryMonitorBehavior::setFlipper(), ArmMC::setOutputCmd(), MotionManager::setPID(), WalkCalibration::setupMoving(), BatteryMonitorBehavior::shouldWarn(), XWalkMC::start(), BatteryMonitorBehavior::startWarning(), SineMC::sync(), HeadPointerMC::takeSnapshot(), ArmMC::takeSnapshot(), Controller::trapEvent(), Kinematics::update(), XWalkMC::updateOutputs(), EmergencyStopMC::updateOutputs(), XWalkMC::updateOutputsInitial(), MotionManager::updatePIDs(), SensorObserverControl::updateRT(), and LogNode::writeSensor().