MCNodeBase Class Reference
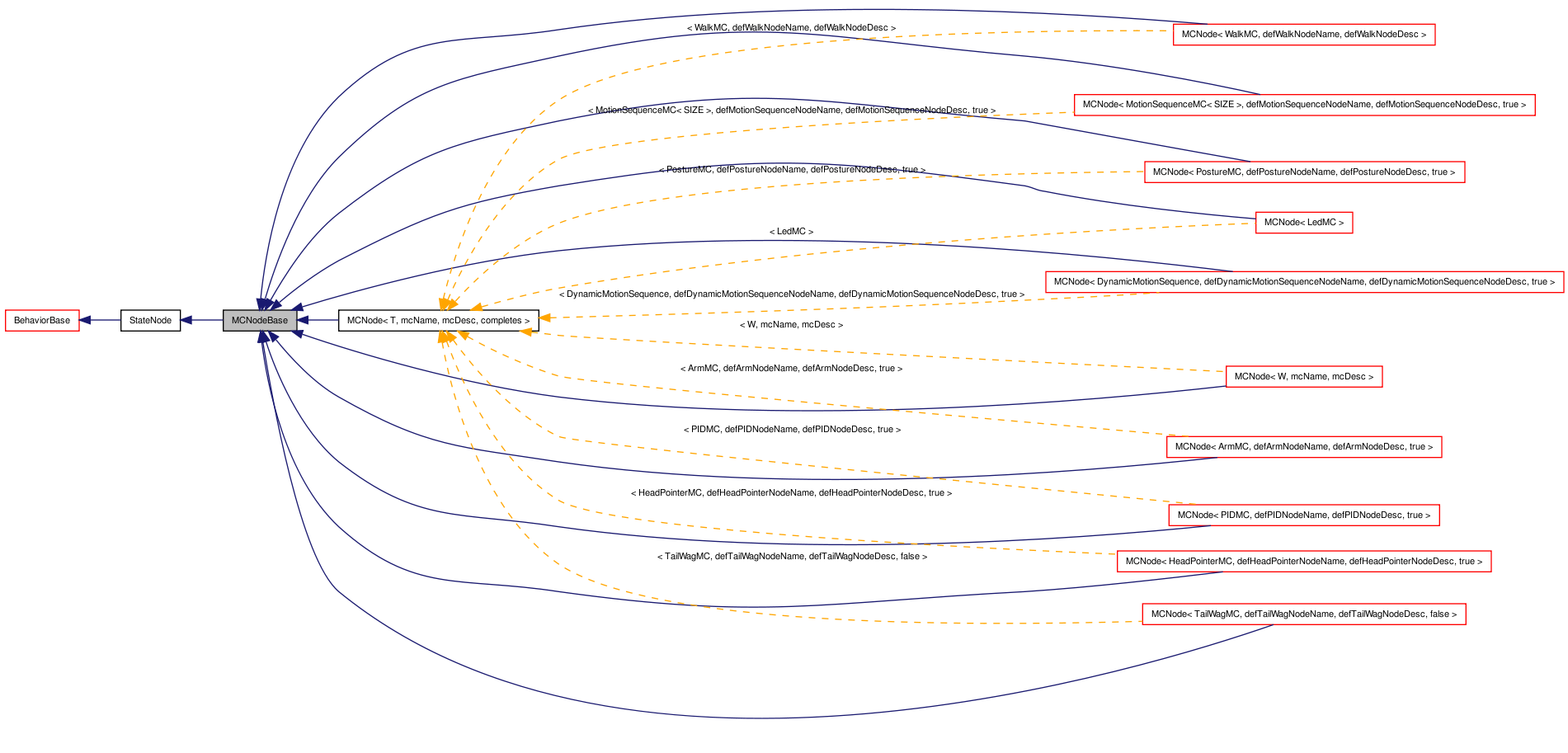
Common parent class for all the templated MCNode, which is what you want to instantiate. More...
#include <MCNode.h>
Detailed Description
Common parent class for all the templated MCNode, which is what you want to instantiate.
Definition at line 11 of file MCNode.h.
Public Member Functions | |
| virtual | ~MCNodeBase () |
| destructor, free mc | |
| virtual void | stop () |
| Removes the motion command from the motion manager if it was our own creation. | |
| virtual void | doEvent () |
| Assumes the event is a completion event from the motion, throws a corresponding state node completion event. | |
| virtual void | setMC (MotionManager::MC_ID mcid) |
| Allows you to assign a previously created motion, which might be shared among several MCNodes. | |
| virtual MotionManager::MC_ID | getMC_ID () |
| reveal the MC_ID; if the motion isn't currently active, returns MotionManager::invalid_MC_ID | |
| virtual float | getPriority () const |
| Return the priority assigned to this node's motion command. | |
| virtual void | setPriority (const float p) |
| Set the priority that will be used when adding this motion command; if the command is already active, change its priority in the MotionManager. | |
| virtual void | motionFails () |
| Post a failure event and abort the motion command. | |
| virtual std::string | getDescription () const |
| Gives a short description of what this particular instantiation does (in case a more specific description is needed on an individual basis). | |
Static Public Member Functions | |
| static std::string | getClassDescription () |
| Gives a short description of what this class of behaviors does... you should override this (but don't have to). | |
Static Public Attributes | |
| static const char | defName [] = "MCNode" |
| the default name for MCNodes -- can be overridden via MCNode's template arguments | |
| static const char | defDesc [] = "A generic wrapper for any MotionCommand" |
| the default description for MCNodes -- can be overridden via MCNode's template arguments | |
Protected Member Functions | |
| MCNodeBase (bool expectCompletion) | |
| constructor for subclasses | |
| MCNodeBase (const std::string &node_name, bool expectCompletion=true) | |
| constructor for subclasses which provide instance name | |
| virtual SharedObjectBase & | getPrivateMC ()=0 |
| returns reference to mc or a new SharedObject<T> if mc is currently NULL (so it will always return a valid value) | |
| virtual bool | hasPrivateMC () |
| returns true if the motion command being used was created internally via getPrivateMC() | |
Protected Attributes | |
| SharedObjectBase * | mc |
| MotionCommand used by this node (may be NULL if sharing the MC with other nodes). | |
| MotionManager::MC_ID | mc_id |
| id number for the MotionCommand | |
| float | priority |
| Priority to use when adding this motion commmand to the MotionManager. | |
| bool | mcCompletes |
| if true, will post a completion when the underlying MotionCommand posts a status | |
Private Member Functions | |
| MCNodeBase (const MCNodeBase &) | |
| don't call (copy constructor) | |
| MCNodeBase & | operator= (const MCNodeBase &) |
| don't call (assignment operator) | |
Constructor & Destructor Documentation
| virtual MCNodeBase::~MCNodeBase | ( | ) | [virtual] |
| MCNodeBase::MCNodeBase | ( | bool | expectCompletion | ) | [protected] |
| MCNodeBase::MCNodeBase | ( | const std::string & | node_name, | |
| bool | expectCompletion = true | |||
| ) | [protected] |
| MCNodeBase::MCNodeBase | ( | const MCNodeBase & | ) | [private] |
don't call (copy constructor)
Member Function Documentation
| void MCNodeBase::doEvent | ( | ) | [virtual] |
Assumes the event is a completion event from the motion, throws a corresponding state node completion event.
Reimplemented from BehaviorBase.
Reimplemented in DynamicMotionSequenceNode, MotionSequenceNode< SIZE >, WaypointEngineNode< W, mcName, mcDesc >, and DualCoding::Pilot::SetOdometryMachine::TurnHead.
| static std::string MCNodeBase::getClassDescription | ( | ) | [static] |
Gives a short description of what this class of behaviors does... you should override this (but don't have to).
If you do override this, also consider overriding getDescription() to return it
Reimplemented from BehaviorBase.
Reimplemented in LedNode, MCNode< T, mcName, mcDesc, completes >, MCNode< LedMC >, MCNode< WalkMC, defWalkNodeName, defWalkNodeDesc >, MCNode< MotionSequenceMC< SIZE >, defMotionSequenceNodeName, defMotionSequenceNodeDesc, true >, MCNode< DynamicMotionSequence, defDynamicMotionSequenceNodeName, defDynamicMotionSequenceNodeDesc, true >, MCNode< PostureMC, defPostureNodeName, defPostureNodeDesc, true >, MCNode< TailWagMC, defTailWagNodeName, defTailWagNodeDesc, false >, MCNode< W, mcName, mcDesc >, MCNode< HeadPointerMC, defHeadPointerNodeName, defHeadPointerNodeDesc, true >, MCNode< PIDMC, defPIDNodeName, defPIDNodeDesc, true >, and MCNode< ArmMC, defArmNodeName, defArmNodeDesc, true >.
Definition at line 45 of file MCNode.h.
Referenced by getDescription().
| virtual std::string MCNodeBase::getDescription | ( | ) | const [virtual] |
Gives a short description of what this particular instantiation does (in case a more specific description is needed on an individual basis).
By default simply returns getName(), because any calls from a BehaviorBase function to getClassDescription() are going to call BehaviorBase::getClassDescription(), not ~YourSubClass~getClassDescription(), because static functions can't be virtual in C++ (doh!)
This means that getDescription called on a pointer to a BehaviorBase of unknown subtype would always return an empty string, which is pretty useless. So instead we return the name in this situation. If you want getDescription to return getClassDescription, you'll have to override it in your subclass to do so.
Reimplemented from BehaviorBase.
Reimplemented in LedNode, MCNode< T, mcName, mcDesc, completes >, MCNode< LedMC >, MCNode< WalkMC, defWalkNodeName, defWalkNodeDesc >, MCNode< MotionSequenceMC< SIZE >, defMotionSequenceNodeName, defMotionSequenceNodeDesc, true >, MCNode< DynamicMotionSequence, defDynamicMotionSequenceNodeName, defDynamicMotionSequenceNodeDesc, true >, MCNode< PostureMC, defPostureNodeName, defPostureNodeDesc, true >, MCNode< TailWagMC, defTailWagNodeName, defTailWagNodeDesc, false >, MCNode< W, mcName, mcDesc >, MCNode< HeadPointerMC, defHeadPointerNodeName, defHeadPointerNodeDesc, true >, MCNode< PIDMC, defPIDNodeName, defPIDNodeDesc, true >, and MCNode< ArmMC, defArmNodeName, defArmNodeDesc, true >.
| virtual MotionManager::MC_ID MCNodeBase::getMC_ID | ( | ) | [virtual] |
reveal the MC_ID; if the motion isn't currently active, returns MotionManager::invalid_MC_ID
Definition at line 30 of file MCNode.h.
Referenced by MotionSequenceNode< SIZE >::doEvent(), and DynamicMotionSequenceNode::doEvent().
| virtual float MCNodeBase::getPriority | ( | ) | const [virtual] |
| virtual SharedObjectBase& MCNodeBase::getPrivateMC | ( | ) | [protected, pure virtual] |
returns reference to mc or a new SharedObject<T> if mc is currently NULL (so it will always return a valid value)
if a particular motion command needs some initial setup besides the default constructor, overriding this function is a good opportunity to do so
Implemented in LedNode, MCNode< T, mcName, mcDesc, completes >, MCNode< LedMC >, MCNode< WalkMC, defWalkNodeName, defWalkNodeDesc >, MCNode< MotionSequenceMC< SIZE >, defMotionSequenceNodeName, defMotionSequenceNodeDesc, true >, MCNode< DynamicMotionSequence, defDynamicMotionSequenceNodeName, defDynamicMotionSequenceNodeDesc, true >, MCNode< PostureMC, defPostureNodeName, defPostureNodeDesc, true >, MCNode< TailWagMC, defTailWagNodeName, defTailWagNodeDesc, false >, MCNode< W, mcName, mcDesc >, MCNode< HeadPointerMC, defHeadPointerNodeName, defHeadPointerNodeDesc, true >, MCNode< PIDMC, defPIDNodeName, defPIDNodeDesc, true >, and MCNode< ArmMC, defArmNodeName, defArmNodeDesc, true >.
| virtual bool MCNodeBase::hasPrivateMC | ( | ) | [protected, virtual] |
returns true if the motion command being used was created internally via getPrivateMC()
Definition at line 67 of file MCNode.h.
Referenced by motionFails(), and stop().
| void MCNodeBase::motionFails | ( | ) | [virtual] |
| MCNodeBase& MCNodeBase::operator= | ( | const MCNodeBase & | ) | [private] |
don't call (assignment operator)
| void MCNodeBase::setMC | ( | MotionManager::MC_ID | mcid | ) | [virtual] |
Allows you to assign a previously created motion, which might be shared among several MCNodes.
If this node already has an mc, then it will be freed, removing from MotionManager if necessary
Definition at line 84 of file MCNode.cc.
Referenced by DualCoding::Pilot::VisualSearchMachine::setup(), DualCoding::Pilot::PushObjectMachine::setup(), DualCoding::Pilot::SetVelocityMachine::setup(), DualCoding::Pilot::WaypointWalkMachine::setup(), DualCoding::Pilot::WalkMachine::setup(), DualCoding::Pilot::ExecutePlan::setup(), Grasper::setup(), Grasper::CloseTheGripper::setup(), Grasper::OpenTheGripper::setup(), Grasper::DoArmDeliver::setup(), and Grasper::DoArmApproach::setup().
| void MCNodeBase::setPriority | ( | const float | p | ) | [virtual] |
Set the priority that will be used when adding this motion command; if the command is already active, change its priority in the MotionManager.
| void MCNodeBase::stop | ( | ) | [virtual] |
Removes the motion command from the motion manager if it was our own creation.
Reimplemented from StateNode.
Reimplemented in LedActivate, WalkNode, and WaypointEngineNode< W, mcName, mcDesc >.
Member Data Documentation
const char MCNodeBase::defDesc = "A generic wrapper for any MotionCommand" [static] |
const char MCNodeBase::defName = "MCNode" [static] |
the default name for MCNodes -- can be overridden via MCNode's template arguments
Definition at line 13 of file MCNode.h.
Referenced by getClassDescription().
SharedObjectBase* MCNodeBase::mc [protected] |
MotionCommand used by this node (may be NULL if sharing the MC with other nodes).
Definition at line 69 of file MCNode.h.
Referenced by MCNode< T, mcName, mcDesc, completes >::getPrivateMC(), LedNode::getPrivateMC(), hasPrivateMC(), setMC(), and ~MCNodeBase().
MotionManager::MC_ID MCNodeBase::mc_id [protected] |
id number for the MotionCommand
Definition at line 70 of file MCNode.h.
Referenced by doEvent(), MCNode< T, mcName, mcDesc, completes >::getMC(), getMC_ID(), motionFails(), MCNode< T, mcName, mcDesc, completes >::postStart(), setMC(), setPriority(), and stop().
bool MCNodeBase::mcCompletes [protected] |
if true, will post a completion when the underlying MotionCommand posts a status
Definition at line 72 of file MCNode.h.
Referenced by doEvent().
float MCNodeBase::priority [protected] |
Priority to use when adding this motion commmand to the MotionManager.
Definition at line 71 of file MCNode.h.
Referenced by getPriority(), MCNode< T, mcName, mcDesc, completes >::postStart(), and setPriority().
The documentation for this class was generated from the following files: