KinematicJoint.h File Reference
Describes KinematicJoint, which manages parameters defining the position and type of motion produced by an actuator (i.e. forward kinematics). More...
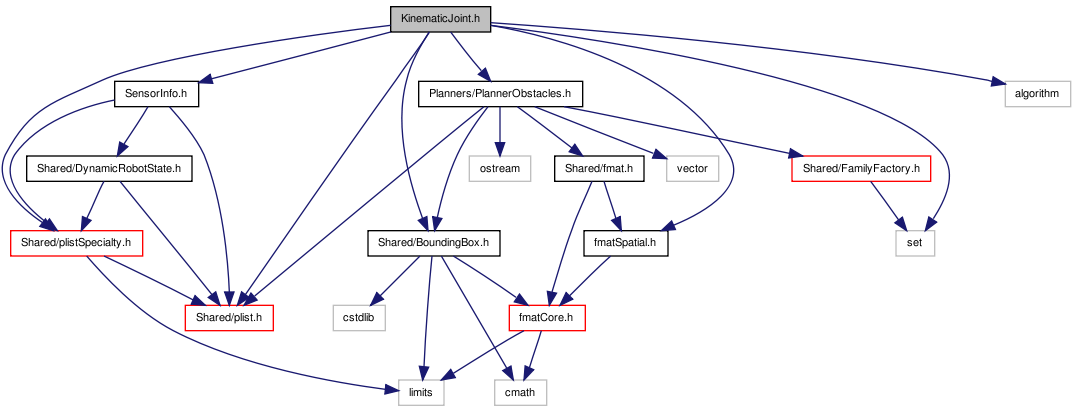
#include "SensorInfo.h"#include "Shared/plist.h"#include "Shared/plistSpecialty.h"#include "Shared/fmatSpatial.h"#include "Shared/BoundingBox.h"#include "Planners/PlannerObstacles.h"#include <set>#include <algorithm>
Include dependency graph for KinematicJoint.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | LinkComponent |
| these let you build the link from a series of model and material settings instead of one static model/material for the whole link More... | |
| class | KinematicJoint |
| Manages parameters which define the position and type of motion produced by an actuator (i.e. forward kinematics). More... | |
| class | KinematicJoint::BranchListener |
| struct | KinematicJoint::ControllerInfo |
| Parameters for joint motion model, used for simulation. More... | |
| class | KinematicJoint::ComponentsListener |
| class | KinematicJointLoader |
| handles the recursive loading of a tree of joints More... | |
| class | KinematicJointSaver |
| handles the recursive saving of a tree of joints More... | |
Detailed Description
Describes KinematicJoint, which manages parameters defining the position and type of motion produced by an actuator (i.e. forward kinematics).
Definition in file KinematicJoint.h.