ShapeSpacePlannerXYTheta.h File Reference
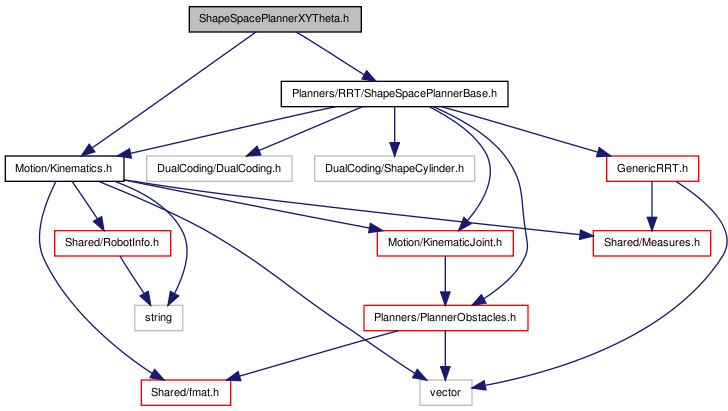
#include "Motion/Kinematics.h"#include "Planners/RRT/ShapeSpacePlannerBase.h"
Include dependency graph for ShapeSpacePlannerXYTheta.h:
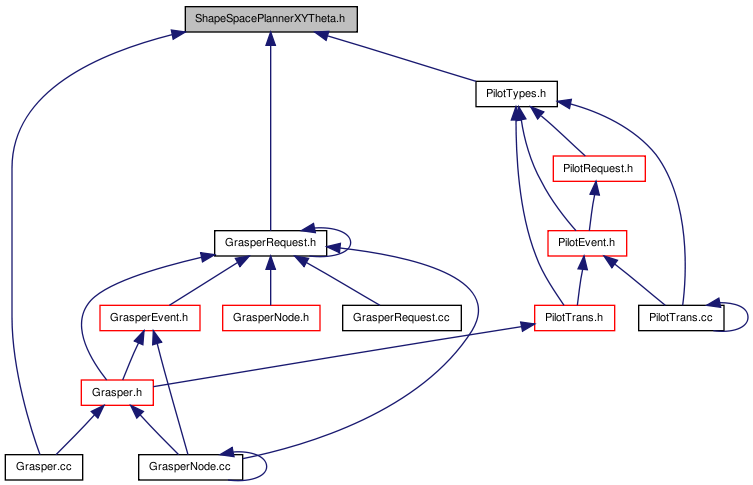
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | RRTNodeXYTheta |
| struct | RRTNodeXYTheta::NodeValue_t |
| class | RRTNodeXYTheta::CollisionChecker |
| class | ShapeSpacePlannerXYTheta |
| Plans a path in a 2D linear space with smooth angle changes (if turnLimit is small), using multiple bounding boxes for collision checking. More... | |
Functions | |
| ostream & | operator<< (ostream &os, const RRTNodeXYTheta::NodeValue_t q) |
Function Documentation
| ostream& operator<< | ( | ostream & | os, | |
| const RRTNodeXYTheta::NodeValue_t | q | |||
| ) |
Definition at line 8 of file ShapeSpacePlannerXYTheta.cc.