WalkMC.h File Reference
Describes WalkMC, a wrapper for the appropriate locomotion mechanism for the current robot (including wheels). More...
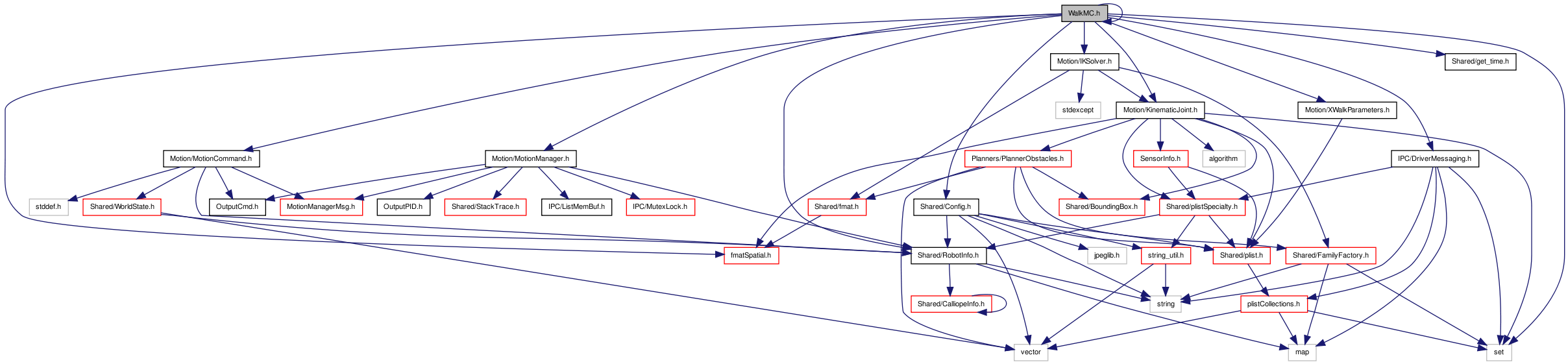
#include "Shared/RobotInfo.h"#include "XWalkMC.h"#include "Motion/XWalkParameters.h"#include "Motion/MotionCommand.h"#include "Motion/MotionManager.h"#include "Motion/KinematicJoint.h"#include "Motion/IKSolver.h"#include "Shared/fmatSpatial.h"#include "Shared/Config.h"#include "Shared/get_time.h"#include "IPC/DriverMessaging.h"#include <set>
Include dependency graph for WalkMC.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Defines | |
| #define | TGT_HAS_WALK |
| #define | TGT_HAS_XWALK |
Typedefs | |
| typedef XWalkMC | WalkMC |
Detailed Description
Describes WalkMC, a wrapper for the appropriate locomotion mechanism for the current robot (including wheels).
Definition in file WalkMC.h.