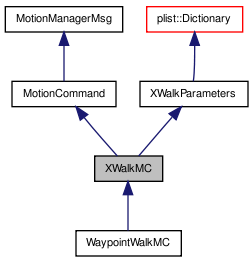
XWalkMC Class Reference
Extreme walk engine handles legged locomotion on hexapods and beyond. More...
#include <XWalkMC.h>
Detailed Description
Extreme walk engine handles legged locomotion on hexapods and beyond.
Definition at line 17 of file XWalkMC.h.
Classes | |
| struct | LegState |
| contains cached information about each leg's stride More... | |
| class | ParameterTransition |
Public Member Functions | |
| XWalkMC () | |
| constructor | |
| const fmat::Column< 2 > & | getTargetVelocity () const |
| Returns the current x and y velocities in mm/sec. | |
| float | getTargetAngVelocity () const |
| Returns the current angular velocity in radians/sec. | |
| virtual void | getTargetVelocity (float &xvel, float &yvel, float &avel) |
| Specify the desired body velocity in x and y (millimeters per second) and angular velocity (radians per second). | |
| virtual void | setTargetVelocity (float xvel, float yvel, float avel) |
| Specify the desired body velocity in x and y (millimeters per second) and angular velocity (radians per second); does not stop automatically. | |
| virtual void | setTargetVelocity (float xvel, float yvel, float avel, float time) |
| Specify the desired body velocity in x and y (millimeters per second) and angular velocity (radians per second), and amount of time (seconds) before stopping. | |
| virtual void | setTargetDisplacement (float xdisp, float ydisp, float adisp, float time=0) |
| Specify the desired body displacement in x and y (millimeters) and angle (radians), optionally specify time (seconds). | |
| virtual void | setTargetDisplacement (float xdisp, float ydisp, float adisp, float xvel, float yvel, float avel) |
| virtual int | updateOutputs () |
| is called once per update cycle, can do any processing you need to change your priorities or set output commands on the MotionManager | |
| void | setDirty () |
| virtual int | isDirty () |
| not used by MotionManager at the moment, but could be used to reduce recomputation, and you may find it useful | |
| virtual int | isAlive () |
| used to prune "dead" motions from the MotionManager | |
| virtual void | start () |
| called after this is added to MotionManager; don't override this, use doStart instead | |
| virtual void | stop () |
| called after this is removed from MotionManager; don't override this, use doStop instead | |
| virtual void | zeroVelocities () |
| Posts a LocomotionEvent and sets velocities to zero. Also forces an output frame setting wheel velocities to zero; needed because if we remove a motion command there may be nothing left to zero the velocities. | |
Protected Member Functions | |
| void | updateNeutralPos (unsigned int curTime) |
| recomputes each leg's LegState::neutralPos based on current values in p | |
| bool | resetPeriod (float time, float speed) |
| void | resetLegState (unsigned int leg, float phase, const fmat::Column< 3 > &curPos, bool inAir, float speed) |
| recomputes LegState::downPos and LegState::liftPos based on specified state variables, such that the direction of stride rotates about the current position | |
| void | updateOutputsInitial (unsigned int curTime, const fmat::Column< 3 > &ground, const fmat::Column< 3 > &gravity, IKSolver::Point tgts[]) |
| void | updateOutputsWalking (float dt, const fmat::Column< 3 > &ground, const fmat::Column< 3 > &gravity, float speed, IKSolver::Point tgts[]) |
| void | sendLoadPredictions (IKSolver::Point tgts[]) |
| void | computePhase (float time) |
| updates globPhase based on specified stride time (relative to startTime) | |
| void | computeLegPhase (unsigned int leg, bool &inAir, float &phase) |
| computes current leg state based on globPhase | |
| void | computeCurrentPosition (unsigned int leg, bool inAir, float speed, float phase, fmat::Column< 3 > &tgt) |
| computes the leg position (in xy plane only) based on leg state | |
| void | computeCurrentBodyOffset (float *legPhases, float speed, float &offx, float &offy, float &offa) |
| computes body position based on settings in p, which should then be added to leg positions before projecting onto ground plane | |
| void | solveIK (unsigned int leg, const IKSolver::Point &tgt) |
| solves inverse kinematics and send affected output values to motion manager | |
| void | computePressure (float mass, float massx, float massy, const std::vector< fmat::Column< 2 > > &contacts, std::vector< float > &pressures) |
| void | spiderSettings (plist::DictionaryBase &src, plist::DictionaryBase &dst) |
| recursively processes contents of src, creating a ParameterTransition for each entry to smoothly update corresponding entries in dst | |
| void | spiderSettings (plist::ArrayBase &src, plist::ArrayBase &dst) |
| recursively processes contents of src, creating a ParameterTransition for each entry to smoothly update corresponding entries in dst | |
Protected Attributes | |
| bool | dirty |
| true if update required | |
| fmat::Column< 2 > | targetVel |
| the requested xy velocity of the body (ignoring parameterized body motion, like sway or surge), millimeters per second | |
| float | targetAngVel |
| the requested angular velocity of the body, radians per second | |
| fmat::Column< 2 > | targetDisp |
| the requesed xy displacement of the body, in millimeters | |
| float | targetAngDisp |
| the requested angular displacement of the body in radians | |
| bool | velocityMode |
| True if we just want to maintain a velocity; false if we're trying to achieve a displacement. | |
| unsigned int | displacementTime |
| time in msecs since setTargetDisplacement called | |
| bool | plantingLegs |
| True if we've finished a displacement and are waiting for all legs to come to ground before posting a status event. | |
| bool | initialPlacement |
| set to true when legs are in an unknown configuration (e.g. following start()) | |
| XWalkParameters | p |
| current parameter values, subject to smoothed transition from those as members of the superclass (see ParameterTransition) | |
| std::set< ParameterTransition * > | transitions |
| full collection of parameter listeners | |
| std::set< ParameterTransition * > | active |
| collection of those listeners which are actively transitioning their corresponding parameters in p | |
| float | startTime |
| must be float (not unsigned int) because value can go negative: phase offset of "walk time" from system get_time() (milliseconds) | |
| float | period |
| the time between leg lifts (milliseconds), calculated value to yield target speed (targetVel) | |
| float | globPhase |
| the current phase within the walk, in turn controls phase of individual legs via updateLegPhase() | |
| fmat::Column< 2 > | rotationCenter |
| if the target angular velocity (targetAngVel) is producing a reasonable curvature vs. targetVel, this is the point about which the body is arcing | |
| DriverMessaging::FixedPoints | contactMsg |
| list of current contact points, for better Mirage simulation | |
| LegState | legStates [NumLegs] |
| storage of cached stride information for each leg | |
Static Protected Attributes | |
| static KinematicJoint * | kine = NULL |
| static KinematicJoint * | childMap [NumReferenceFrames] |
Constructor & Destructor Documentation
| XWalkMC::XWalkMC | ( | ) |
constructor
Definition at line 17 of file XWalkMC.cc.
Member Function Documentation
| void XWalkMC::computeCurrentBodyOffset | ( | float * | legPhases, | |
| float | speed, | |||
| float & | offx, | |||
| float & | offy, | |||
| float & | offa | |||
| ) | [protected] |
computes body position based on settings in p, which should then be added to leg positions before projecting onto ground plane
Definition at line 935 of file XWalkMC.cc.
Referenced by setTargetVelocity(), updateOutputsInitial(), and updateOutputsWalking().
| void XWalkMC::computeCurrentPosition | ( | unsigned int | leg, | |
| bool | inAir, | |||
| float | speed, | |||
| float | phase, | |||
| fmat::Column< 3 > & | tgt | |||
| ) | [protected] |
computes the leg position (in xy plane only) based on leg state
Definition at line 914 of file XWalkMC.cc.
Referenced by resetLegState(), setTargetVelocity(), and updateOutputsWalking().
| void XWalkMC::computeLegPhase | ( | unsigned int | leg, | |
| bool & | inAir, | |||
| float & | phase | |||
| ) | [protected] |
computes current leg state based on globPhase
Definition at line 899 of file XWalkMC.cc.
Referenced by setTargetVelocity(), updateOutputsInitial(), and updateOutputsWalking().
| void XWalkMC::computePhase | ( | float | time | ) | [protected] |
updates globPhase based on specified stride time (relative to startTime)
Definition at line 892 of file XWalkMC.cc.
Referenced by resetPeriod(), setTargetVelocity(), start(), updateOutputsInitial(), and updateOutputsWalking().
| void XWalkMC::computePressure | ( | float | mass, | |
| float | massx, | |||
| float | massy, | |||
| const std::vector< fmat::Column< 2 > > & | contacts, | |||
| std::vector< float > & | pressures | |||
| ) | [protected] |
- Parameters:
-
mass being supported in kilograms massx center of mass along x axis, in millimeters massy center of mass along y axis, in millimeters contacts position of each support contact, in millimeters [out] pressures will be resized and overwritten with pressure at each corresponding point in contacts, in newtons
Note the z position is irrelevant, all points should be projected to the same plane, normal to gravity vector.
Thanks Jacqueline K. Libby for helping figure out the free-body diagram/computation upon which this function is based.
Definition at line 1027 of file XWalkMC.cc.
Referenced by sendLoadPredictions().
| float XWalkMC::getTargetAngVelocity | ( | ) | const |
| const fmat::Column<2>& XWalkMC::getTargetVelocity | ( | ) | const |
| virtual int XWalkMC::isAlive | ( | ) | [virtual] |
used to prune "dead" motions from the MotionManager
note that a motion could be "paused" or inactive and therefore not dirty, but still alive, biding its time to "strike" ;)
- Returns:
- zero if the motion is still processing, non-zero otherwise
Implements MotionCommand.
| virtual int XWalkMC::isDirty | ( | ) | [virtual] |
not used by MotionManager at the moment, but could be used to reduce recomputation, and you may find it useful
- Returns:
- zero if none of the commands have changed since last getJointCmd(), else non-zero
Implements MotionCommand.
Definition at line 51 of file XWalkMC.h.
Referenced by computePhase(), and updateOutputs().
| void XWalkMC::resetLegState | ( | unsigned int | leg, | |
| float | phase, | |||
| const fmat::Column< 3 > & | curPos, | |||
| bool | inAir, | |||
| float | speed | |||
| ) | [protected] |
recomputes LegState::downPos and LegState::liftPos based on specified state variables, such that the direction of stride rotates about the current position
Definition at line 484 of file XWalkMC.cc.
Referenced by start(), and updateOutputsInitial().
Definition at line 412 of file XWalkMC.cc.
Referenced by setTargetVelocity().
| void XWalkMC::sendLoadPredictions | ( | IKSolver::Point | tgts[] | ) | [protected] |
Definition at line 808 of file XWalkMC.cc.
Referenced by updateOutputs().
| void XWalkMC::setDirty | ( | ) |
Reimplemented in WaypointWalkMC.
| void XWalkMC::setTargetDisplacement | ( | float | xdisp, | |
| float | ydisp, | |||
| float | adisp, | |||
| float | time = 0 | |||
| ) | [virtual] |
Specify the desired body displacement in x and y (millimeters) and angle (radians), optionally specify time (seconds).
Corresponding velocity will be limited to max velocity, so setting time=0 implies max speed
Definition at line 221 of file XWalkMC.cc.
Specify the desired body velocity in x and y (millimeters per second) and angular velocity (radians per second), and amount of time (seconds) before stopping.
Definition at line 208 of file XWalkMC.cc.
Specify the desired body velocity in x and y (millimeters per second) and angular velocity (radians per second); does not stop automatically.
Definition at line 35 of file XWalkMC.cc.
Referenced by setTargetDisplacement(), setTargetVelocity(), updateOutputs(), XWalkMC(), and zeroVelocities().
| void XWalkMC::solveIK | ( | unsigned int | leg, | |
| const IKSolver::Point & | tgt | |||
| ) | [protected] |
solves inverse kinematics and send affected output values to motion manager
Definition at line 951 of file XWalkMC.cc.
Referenced by updateOutputsInitial(), and updateOutputsWalking().
| void XWalkMC::spiderSettings | ( | plist::ArrayBase & | src, | |
| plist::ArrayBase & | dst | |||
| ) | [protected] |
recursively processes contents of src, creating a ParameterTransition for each entry to smoothly update corresponding entries in dst
Definition at line 1111 of file XWalkMC.cc.
| void XWalkMC::spiderSettings | ( | plist::DictionaryBase & | src, | |
| plist::DictionaryBase & | dst | |||
| ) | [protected] |
recursively processes contents of src, creating a ParameterTransition for each entry to smoothly update corresponding entries in dst
Definition at line 1097 of file XWalkMC.cc.
Referenced by spiderSettings(), and XWalkMC().
| void XWalkMC::start | ( | ) | [virtual] |
called after this is added to MotionManager; don't override this, use doStart instead
Reimplemented from MotionCommand.
Definition at line 305 of file XWalkMC.cc.
| void XWalkMC::stop | ( | ) | [virtual] |
called after this is removed from MotionManager; don't override this, use doStop instead
Reimplemented from MotionCommand.
Definition at line 328 of file XWalkMC.cc.
| void XWalkMC::updateNeutralPos | ( | unsigned int | curTime | ) | [protected] |
recomputes each leg's LegState::neutralPos based on current values in p
Definition at line 388 of file XWalkMC.cc.
Referenced by updateOutputs(), and XWalkMC().
| int XWalkMC::updateOutputs | ( | ) | [virtual] |
is called once per update cycle, can do any processing you need to change your priorities or set output commands on the MotionManager
- Returns:
- zero if no changes were made, non-zero otherwise
- See also:
- RobotInfo::NumFrames
- RobotInfo::FrameTime
Implements MotionCommand.
Reimplemented in WaypointWalkMC.
Definition at line 240 of file XWalkMC.cc.
| void XWalkMC::updateOutputsInitial | ( | unsigned int | curTime, | |
| const fmat::Column< 3 > & | ground, | |||
| const fmat::Column< 3 > & | gravity, | |||
| IKSolver::Point | tgts[] | |||
| ) | [protected] |
Definition at line 515 of file XWalkMC.cc.
Referenced by updateOutputs().
| void XWalkMC::updateOutputsWalking | ( | float | dt, | |
| const fmat::Column< 3 > & | ground, | |||
| const fmat::Column< 3 > & | gravity, | |||
| float | speed, | |||
| IKSolver::Point | tgts[] | |||
| ) | [protected] |
Definition at line 657 of file XWalkMC.cc.
Referenced by updateOutputs().
| void XWalkMC::zeroVelocities | ( | ) | [virtual] |
Posts a LocomotionEvent and sets velocities to zero. Also forces an output frame setting wheel velocities to zero; needed because if we remove a motion command there may be nothing left to zero the velocities.
Definition at line 350 of file XWalkMC.cc.
Member Data Documentation
std::set<ParameterTransition*> XWalkMC::active [protected] |
collection of those listeners which are actively transitioning their corresponding parameters in p
Definition at line 151 of file XWalkMC.h.
Referenced by isDirty(), spiderSettings(), updateNeutralPos(), and updateOutputs().
KinematicJoint * XWalkMC::childMap [static, protected] |
Definition at line 178 of file XWalkMC.h.
Referenced by sendLoadPredictions(), setTargetVelocity(), solveIK(), start(), stop(), updateNeutralPos(), updateOutputsInitial(), updateOutputsWalking(), and XWalkMC().
DriverMessaging::FixedPoints XWalkMC::contactMsg [protected] |
list of current contact points, for better Mirage simulation
Definition at line 156 of file XWalkMC.h.
Referenced by stop(), updateOutputsInitial(), and updateOutputsWalking().
bool XWalkMC::dirty [protected] |
true if update required
Definition at line 140 of file XWalkMC.h.
Referenced by isDirty(), and setDirty().
unsigned int XWalkMC::displacementTime [protected] |
time in msecs since setTargetDisplacement called
Definition at line 146 of file XWalkMC.h.
Referenced by setTargetDisplacement(), setTargetVelocity(), updateOutputs(), updateOutputsInitial(), and zeroVelocities().
float XWalkMC::globPhase [protected] |
the current phase within the walk, in turn controls phase of individual legs via updateLegPhase()
Definition at line 154 of file XWalkMC.h.
Referenced by computeCurrentBodyOffset(), computeLegPhase(), computePhase(), resetPeriod(), updateOutputsInitial(), and updateOutputsWalking().
bool XWalkMC::initialPlacement [protected] |
set to true when legs are in an unknown configuration (e.g. following start())
Definition at line 148 of file XWalkMC.h.
Referenced by resetPeriod(), setTargetVelocity(), start(), updateOutputs(), and updateOutputsInitial().
KinematicJoint * XWalkMC::kine = NULL [static, protected] |
Definition at line 177 of file XWalkMC.h.
Referenced by start(), updateOutputs(), updateOutputsInitial(), and XWalkMC().
LegState XWalkMC::legStates[NumLegs] [protected] |
storage of cached stride information for each leg
Definition at line 175 of file XWalkMC.h.
Referenced by computeCurrentPosition(), computeLegPhase(), isDirty(), resetLegState(), resetPeriod(), sendLoadPredictions(), setTargetVelocity(), start(), updateNeutralPos(), updateOutputsInitial(), and updateOutputsWalking().
XWalkParameters XWalkMC::p [protected] |
current parameter values, subject to smoothed transition from those as members of the superclass (see ParameterTransition)
Definition at line 149 of file XWalkMC.h.
Referenced by computeCurrentBodyOffset(), computeLegPhase(), setTargetVelocity(), updateNeutralPos(), updateOutputsInitial(), updateOutputsWalking(), and XWalkMC().
float XWalkMC::period [protected] |
the time between leg lifts (milliseconds), calculated value to yield target speed (targetVel)
Definition at line 153 of file XWalkMC.h.
Referenced by computeCurrentPosition(), computeLegPhase(), computePhase(), resetPeriod(), setTargetVelocity(), start(), updateOutputsInitial(), and updateOutputsWalking().
bool XWalkMC::plantingLegs [protected] |
True if we've finished a displacement and are waiting for all legs to come to ground before posting a status event.
Definition at line 147 of file XWalkMC.h.
Referenced by setTargetDisplacement(), setTargetVelocity(), and updateOutputs().
fmat::Column<2> XWalkMC::rotationCenter [protected] |
if the target angular velocity (targetAngVel) is producing a reasonable curvature vs. targetVel, this is the point about which the body is arcing
Definition at line 155 of file XWalkMC.h.
Referenced by computeCurrentPosition(), resetPeriod(), and setTargetVelocity().
float XWalkMC::startTime [protected] |
must be float (not unsigned int) because value can go negative: phase offset of "walk time" from system get_time() (milliseconds)
Definition at line 152 of file XWalkMC.h.
Referenced by resetPeriod(), setTargetVelocity(), start(), updateOutputs(), updateOutputsInitial(), and XWalkMC().
float XWalkMC::targetAngDisp [protected] |
the requested angular displacement of the body in radians
Definition at line 144 of file XWalkMC.h.
Referenced by setTargetDisplacement(), setTargetVelocity(), and updateOutputs().
float XWalkMC::targetAngVel [protected] |
the requested angular velocity of the body, radians per second
Definition at line 142 of file XWalkMC.h.
Referenced by computeCurrentPosition(), getTargetAngVelocity(), getTargetVelocity(), isDirty(), resetPeriod(), setTargetVelocity(), updateOutputs(), updateOutputsInitial(), updateOutputsWalking(), and XWalkMC().
fmat::Column<2> XWalkMC::targetDisp [protected] |
the requesed xy displacement of the body, in millimeters
Definition at line 143 of file XWalkMC.h.
Referenced by setTargetDisplacement(), setTargetVelocity(), and updateOutputs().
fmat::Column<2> XWalkMC::targetVel [protected] |
the requested xy velocity of the body (ignoring parameterized body motion, like sway or surge), millimeters per second
Definition at line 141 of file XWalkMC.h.
Referenced by computeCurrentBodyOffset(), computeCurrentPosition(), getTargetVelocity(), isDirty(), resetPeriod(), setTargetVelocity(), updateOutputs(), updateOutputsInitial(), and XWalkMC().
std::set<ParameterTransition*> XWalkMC::transitions [protected] |
full collection of parameter listeners
Definition at line 150 of file XWalkMC.h.
Referenced by spiderSettings().
bool XWalkMC::velocityMode [protected] |
True if we just want to maintain a velocity; false if we're trying to achieve a displacement.
Definition at line 145 of file XWalkMC.h.
Referenced by setTargetDisplacement(), setTargetVelocity(), and updateOutputs().
The documentation for this class was generated from the following files: