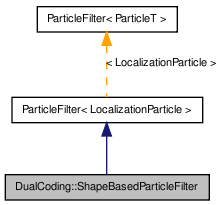
DualCoding::ShapeBasedParticleFilter Class Reference
Bundles a motion model (DeadReckoningBehavior or CreateMotionModel) and a ShapeSensorModel for easy use of a shape-based particle filter for localization. More...
#include <ShapeBasedParticleFilter.h>
Detailed Description
Bundles a motion model (DeadReckoningBehavior or CreateMotionModel) and a ShapeSensorModel for easy use of a shape-based particle filter for localization.
Definition at line 99 of file ShapeBasedParticleFilter.h.
Public Member Functions | |
| ShapeBasedParticleFilter (ShapeSpace &camShS, ShapeSpace &localShS, ShapeSpace &worldShS, unsigned int numParticles=2000) | |
| constructor, must pass local and world shape spaces, which will be used in future calls to update() | |
| virtual | ~ShapeBasedParticleFilter () |
| destructor | |
| virtual void | updateFromLocal () |
| virtual void | updateFromCamera () |
| virtual ShapeSensorModel < LocalizationParticle > & | getSensorModel () const |
| accessor for sensorModel | |
| virtual void | setSensorModel (ShapeSensorModel< LocalizationParticle > *customSensorModel) |
| replaces the sensor model in use, the particle filter will take responsibility for deallocating the sensor model's memory when destructed or replaced | |
| virtual void | resetFilter () |
| randomizes all the particles | |
| virtual void | resizeParticles (unsigned int numParticles) |
| Adjusts the size of the particle collection -- more particles gives better coverage, but more computation. | |
| virtual void | synchEstimateToAgent () |
| Synchs the estimate to the agent's current position and heading in worldShS. During odometry, the Pilot will use the estimate to update the agent's position. | |
| virtual void | setPosition (float const x, float const y, AngTwoPi const orientation, float variance=0) |
| Resets particles to the specified position and orientation, and optionally jiggles them by variance. | |
| virtual void | computeVariance () |
| Computes the weighted variance in the position and heading estimates of the particle collection. | |
| virtual void | setWorldBounds (const Shape< PolygonData > &bounds) |
| Sets boundary within which particles should lie. | |
| virtual void | setWorldBounds (float minX, float width, float minY, float height) |
| Sets boundary within which particles should lie. | |
| virtual void | displayParticles (float const howmany=100) |
| Displays particles on the world map using a GraphicsData shape; howmany can either be a percentage (<= 1.0) or a whole number. | |
| virtual void | displayIndividualParticles (float const howmany=100) |
| Displays individual particles on the world map using LocalizationParticle shapes; howmany can either be a percentage (<= 1.0) or a whole number. | |
Static Public Member Functions | |
| static void | deleteParticleDisplay (ShapeSpace &wShS) |
| Deletes particle shapes and "particle" GraphicsData object so we can prepare a new display. | |
Protected Attributes | |
| ShapeSensorModel < LocalizationParticle > * | sensorModel |
| provides evaluation of particles | |
Private Member Functions | |
| ShapeBasedParticleFilter (const ShapeBasedParticleFilter &) | |
| don't call (copy constructor) | |
| ShapeBasedParticleFilter & | operator= (const ShapeBasedParticleFilter &) |
| don't call (assignment operator) | |
Constructor & Destructor Documentation
| DualCoding::ShapeBasedParticleFilter::ShapeBasedParticleFilter | ( | ShapeSpace & | camShS, | |
| ShapeSpace & | localShS, | |||
| ShapeSpace & | worldShS, | |||
| unsigned int | numParticles = 2000 | |||
| ) |
constructor, must pass local and world shape spaces, which will be used in future calls to update()
Definition at line 103 of file ShapeBasedParticleFilter.h.
| virtual DualCoding::ShapeBasedParticleFilter::~ShapeBasedParticleFilter | ( | ) | [virtual] |
destructor
Definition at line 134 of file ShapeBasedParticleFilter.h.
| DualCoding::ShapeBasedParticleFilter::ShapeBasedParticleFilter | ( | const ShapeBasedParticleFilter & | ) | [private] |
don't call (copy constructor)
Member Function Documentation
| void DualCoding::ShapeBasedParticleFilter::computeVariance | ( | ) | [virtual] |
Computes the weighted variance in the position and heading estimates of the particle collection.
Reimplemented from ParticleFilter< LocalizationParticle >.
Definition at line 44 of file ShapeBasedParticleFilter.cc.
| void DualCoding::ShapeBasedParticleFilter::deleteParticleDisplay | ( | ShapeSpace & | wShS | ) | [static] |
Deletes particle shapes and "particle" GraphicsData object so we can prepare a new display.
Definition at line 95 of file ShapeBasedParticleFilter.cc.
Referenced by displayIndividualParticles(), and displayParticles().
| void DualCoding::ShapeBasedParticleFilter::displayIndividualParticles | ( | float const | howmany = 100 |
) | [virtual] |
Displays individual particles on the world map using LocalizationParticle shapes; howmany can either be a percentage (<= 1.0) or a whole number.
Definition at line 118 of file ShapeBasedParticleFilter.cc.
| void DualCoding::ShapeBasedParticleFilter::displayParticles | ( | float const | howmany = 100 |
) | [virtual] |
Displays particles on the world map using a GraphicsData shape; howmany can either be a percentage (<= 1.0) or a whole number.
Definition at line 102 of file ShapeBasedParticleFilter.cc.
Referenced by resizeParticles().
| virtual ShapeSensorModel<LocalizationParticle>& DualCoding::ShapeBasedParticleFilter::getSensorModel | ( | ) | const [virtual] |
accessor for sensorModel
Definition at line 152 of file ShapeBasedParticleFilter.h.
Referenced by updateFromCamera(), and updateFromLocal().
| ShapeBasedParticleFilter& DualCoding::ShapeBasedParticleFilter::operator= | ( | const ShapeBasedParticleFilter & | ) | [private] |
don't call (assignment operator)
| void DualCoding::ShapeBasedParticleFilter::resetFilter | ( | ) | [virtual] |
randomizes all the particles
Definition at line 18 of file ShapeBasedParticleFilter.cc.
| void DualCoding::ShapeBasedParticleFilter::resizeParticles | ( | unsigned int | numParticles | ) | [virtual] |
Adjusts the size of the particle collection -- more particles gives better coverage, but more computation.
You may wish to shrink the number of particles when the confidence interval is small or particle weights are high, and increase particles when the filter is getting "lost".
Reimplemented from ParticleFilter< LocalizationParticle >.
Definition at line 23 of file ShapeBasedParticleFilter.cc.
| void DualCoding::ShapeBasedParticleFilter::setPosition | ( | float const | x, | |
| float const | y, | |||
| AngTwoPi const | orientation, | |||
| float | variance = 0 | |||
| ) | [virtual] |
Resets particles to the specified position and orientation, and optionally jiggles them by variance.
Definition at line 39 of file ShapeBasedParticleFilter.cc.
| virtual void DualCoding::ShapeBasedParticleFilter::setSensorModel | ( | ShapeSensorModel< LocalizationParticle > * | customSensorModel | ) | [virtual] |
replaces the sensor model in use, the particle filter will take responsibility for deallocating the sensor model's memory when destructed or replaced
Definition at line 155 of file ShapeBasedParticleFilter.h.
| void DualCoding::ShapeBasedParticleFilter::setWorldBounds | ( | float | minX, | |
| float | width, | |||
| float | minY, | |||
| float | height | |||
| ) | [virtual] |
Sets boundary within which particles should lie.
Definition at line 79 of file ShapeBasedParticleFilter.cc.
| void DualCoding::ShapeBasedParticleFilter::setWorldBounds | ( | const Shape< PolygonData > & | bounds | ) | [virtual] |
Sets boundary within which particles should lie.
Definition at line 70 of file ShapeBasedParticleFilter.cc.
| void DualCoding::ShapeBasedParticleFilter::synchEstimateToAgent | ( | ) | [virtual] |
Synchs the estimate to the agent's current position and heading in worldShS. During odometry, the Pilot will use the estimate to update the agent's position.
Definition at line 33 of file ShapeBasedParticleFilter.cc.
| virtual void DualCoding::ShapeBasedParticleFilter::updateFromCamera | ( | ) | [virtual] |
Definition at line 147 of file ShapeBasedParticleFilter.h.
| virtual void DualCoding::ShapeBasedParticleFilter::updateFromLocal | ( | ) | [virtual] |
Definition at line 143 of file ShapeBasedParticleFilter.h.
Member Data Documentation
ShapeSensorModel<LocalizationParticle>* DualCoding::ShapeBasedParticleFilter::sensorModel [protected] |
provides evaluation of particles
Definition at line 196 of file ShapeBasedParticleFilter.h.
Referenced by displayIndividualParticles(), displayParticles(), getSensorModel(), resizeParticles(), setSensorModel(), and ~ShapeBasedParticleFilter().
The documentation for this class was generated from the following files: