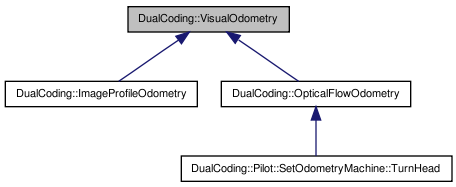
DualCoding::VisualOdometry Class Reference
Generic visual odometry class; can be used for multiple algorithms. More...
#include <VisualOdometry.h>
Detailed Description
Generic visual odometry class; can be used for multiple algorithms.
Definition at line 18 of file VisualOdometry.h.
Public Member Functions | |
| VisualOdometry () | |
| virtual | ~VisualOdometry () |
| virtual void | update (bool overrideSleep=false)=0 |
| virtual float | getAngle () |
| virtual int | getTranslation () |
| virtual float | getIntegratedAngle () |
| virtual void | setConversionParameters (float slope, float offset)=0 |
| Set parameters for converting from translation units (pixels) to rotation angle (radians). | |
| virtual unsigned int | suggestedFrameRate () const =0 |
| Number of milliseconds between odometry updates. | |
Static Public Attributes | |
| static const float | ANGULAR_RESOLUTION |
| Number of pixels of translation accross the camera frame per degree of camera rotation. | |
Protected Attributes | |
| bool | sleeping |
| True if not currently subscribed to images. | |
| float | lastAngle |
| int | lastTranslation |
Constructor & Destructor Documentation
| DualCoding::VisualOdometry::VisualOdometry | ( | ) |
Definition at line 20 of file VisualOdometry.h.
| virtual DualCoding::VisualOdometry::~VisualOdometry | ( | ) | [virtual] |
Definition at line 22 of file VisualOdometry.h.
Member Function Documentation
| virtual float DualCoding::VisualOdometry::getAngle | ( | ) | [virtual] |
Reimplemented in DualCoding::ImageProfileOdometry.
Definition at line 25 of file VisualOdometry.h.
| virtual float DualCoding::VisualOdometry::getIntegratedAngle | ( | ) | [virtual] |
Reimplemented in DualCoding::OpticalFlowOdometry.
Definition at line 27 of file VisualOdometry.h.
| virtual int DualCoding::VisualOdometry::getTranslation | ( | ) | [virtual] |
Reimplemented in DualCoding::ImageProfileOdometry.
Definition at line 26 of file VisualOdometry.h.
Referenced by DualCoding::Pilot::SetOdometryMachine::doStop(), and DualCoding::Pilot::SetOdometryMachine::TurnHead::doStop().
| virtual void DualCoding::VisualOdometry::setConversionParameters | ( | float | slope, | |
| float | offset | |||
| ) | [pure virtual] |
Set parameters for converting from translation units (pixels) to rotation angle (radians).
Implemented in DualCoding::OpticalFlowOdometry, and DualCoding::ImageProfileOdometry.
| virtual unsigned int DualCoding::VisualOdometry::suggestedFrameRate | ( | ) | const [pure virtual] |
Number of milliseconds between odometry updates.
Implemented in DualCoding::OpticalFlowOdometry, and DualCoding::ImageProfileOdometry.
| virtual void DualCoding::VisualOdometry::update | ( | bool | overrideSleep = false |
) | [pure virtual] |
Implemented in DualCoding::OpticalFlowOdometry, and DualCoding::ImageProfileOdometry.
Member Data Documentation
const float VisualOdometry::ANGULAR_RESOLUTION [static] |
RobotInfo::CameraResolutionX / (RobotInfo::CameraHorizFOV / M_PI * 180)
Number of pixels of translation accross the camera frame per degree of camera rotation.
Definition at line 37 of file VisualOdometry.h.
float DualCoding::VisualOdometry::lastAngle [protected] |
Definition at line 41 of file VisualOdometry.h.
Referenced by getAngle(), DualCoding::ImageProfileOdometry::update(), and DualCoding::OpticalFlowOdometry::update().
int DualCoding::VisualOdometry::lastTranslation [protected] |
Definition at line 42 of file VisualOdometry.h.
Referenced by getTranslation(), DualCoding::ImageProfileOdometry::update(), and DualCoding::OpticalFlowOdometry::update().
bool DualCoding::VisualOdometry::sleeping [protected] |
True if not currently subscribed to images.
Definition at line 40 of file VisualOdometry.h.
Referenced by DualCoding::ImageProfileOdometry::update(), and DualCoding::OpticalFlowOdometry::update().
The documentation for this class was generated from the following files: