MotionManager.h File Reference
Describes MotionManager, simplifies sharing of MotionCommand's and provides mutual exclusion to their access. More...
#include "OutputCmd.h"#include "OutputPID.h"#include "Shared/RobotInfo.h"#include "Shared/StackTrace.h"#include "IPC/ListMemBuf.h"#include "IPC/MutexLock.h"#include "MotionManagerMsg.h"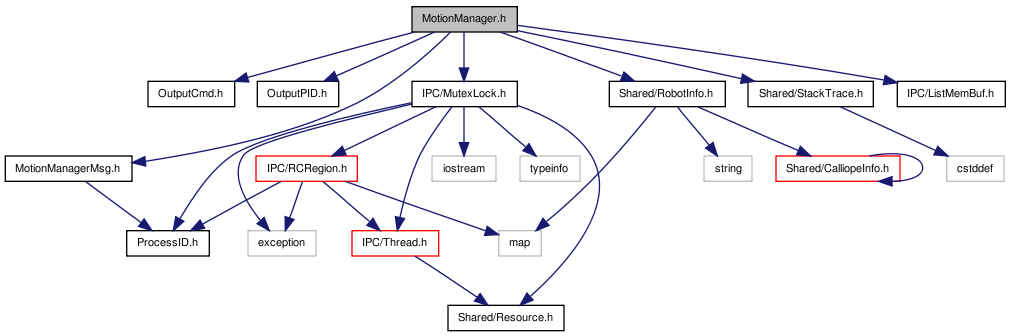
Go to the source code of this file.
Classes | |
| class | MotionManager |
| The purpose of this class is to repeatedly compute the final set of joint angles for the robot, managing a set of (possibly conflicting) MotionCommands. More... | |
| class | MotionManager::OutputState |
| holds the full requested value of an output More... | |
| struct | MotionManager::PIDUpdate |
| used to request pids for a given joint More... | |
| struct | MotionManager::CommandEntry |
| All the information we need to maintain about a MotionCommand. More... | |
Variables | |
| MotionManager * | motman |
| anyone who includes MotionManager.h will be wanting to use the global motman... don't want multiple of these! created by MotoObj | |
Detailed Description
Describes MotionManager, simplifies sharing of MotionCommand's and provides mutual exclusion to their access.
Definition in file MotionManager.h.
Variable Documentation
anyone who includes MotionManager.h will be wanting to use the global motman... don't want multiple of these! created by MotoObj
Definition at line 23 of file MotionManager.cc.
Referenced by WaypointWalkControl::activate(), TorqueCalibrate::TakeMeasurementControl::activate(), PostureEditor::activate(), Controller::activate(), BehaviorBase::addMotion(), MMAccessor< MC_t >::checkin(), MMAccessor< MC_t >::checkout(), ArmMC::clearGripperPulse(), WaypointWalkControl::deactivate(), TorqueCalibrate::TakeMeasurementControl::deactivate(), PostureEditor::deactivate(), Controller::deactivate(), FlashIPAddrBehavior::doEvent(), BatteryMonitorBehavior::doEvent(), MCValueEditControl< T >::doSelect(), DualCoding::Pilot::PushObjectMachine::AdjustPush::doStart(), DualCoding::Pilot::PushObjectMachine::FetchObj::doStart(), DualCoding::Pilot::PushObjectMachine::WalkForward::doStart(), DualCoding::Pilot::PushObjectMachine::WalkBackward::doStart(), DualCoding::Pilot::ExecutePlan::Turn::doStart(), DualCoding::Pilot::ExecutePlan::Walk::doStart(), DualCoding::Lookout::doStart(), HeadController::doStart(), FlashIPAddrBehavior::doStart(), Controller::doStart(), CameraBehavior::doStart(), ArmController::doStart(), DualCoding::Lookout::doStop(), HeadController::doStop(), Grasper::doStop(), FlashIPAddrBehavior::doStop(), Controller::doStop(), CameraBehavior::doStop(), ArmController::doStop(), EmergencyStopMC::freezeJoints(), MMAccessor< MC_t >::MMAccessor(), MCNodeBase::motionFails(), DualCoding::Lookout::moveHeadToPoint(), MCNode< T, mcName, mcDesc, completes >::postStart(), RecordMotionNode::preStart(), RunSequenceControl< SequenceSize >::processEvent(), LoadPostureControl::processEvent(), DualCoding::Lookout::processPointAtEvent(), DualCoding::Lookout::processScanEvent(), DualCoding::Lookout::processSearchEvent(), DualCoding::Lookout::relax(), RunSequenceControl< SequenceSize >::runFile(), LoadPostureControl::runFile(), DualCoding::Lookout::scanAlongLine(), DualCoding::Lookout::scanAlongPolygon(), RunSequenceControl< SequenceSize >::selectedFile(), LoadWalkControl::selectedFile(), LoadPostureControl::selectedFile(), PostureMC::setDirty(), HeadPointerMC::setDirty(), ArmMC::setDirty(), Controller::setEStopID(), UPennWalkMC::SetLegJoints(), MCNodeBase::setMC(), PostureMC::setOutputCmd(), MCNodeBase::setPriority(), DualCoding::Pilot::setup(), Grasper::setup(), DualCoding::Lookout::setupSearch(), DualCoding::Lookout::setupTrack(), XWalkMC::solveIK(), GaitedFootstepMC::solveIK(), BatteryMonitorBehavior::startWarning(), RecordMotionNode::stop(), MCNodeBase::stop(), LedActivate::stop(), BatteryMonitorBehavior::stopWarning(), TorqueCalibrate::TakeMeasurementControl::takeInput(), SaveWalkControl::takeInput(), DualCoding::Lookout::triggerScanMotionSequence(), DualCoding::Lookout::triggerSearchMotionSequence(), LedEngine::updateLEDs(), TailWagMC::updateOutputs(), SineMC::updateOutputs(), RemoteControllerMC::updateOutputs(), PostureMC::updateOutputs(), PIDMC::updateOutputs(), MotionSequenceMC< MAXMOVE >::updateOutputs(), LedMC::updateOutputs(), HeadPointerMC::updateOutputs(), EmergencyStopMC::updateOutputs(), ArmMC::updateOutputs(), XWalkMC::updateOutputsWalking(), LoadPostureControl::~LoadPostureControl(), BehaviorBase::MonitorMotion::~MonitorMotion(), and RunSequenceControl< SequenceSize >::~RunSequenceControl().