|
This is the Version History Archive
Please visit the main Version History page for current
releases
2.0.1
|
|
2004-02-05
|
Docs:HTML
|
|
Source:Full
Patch: All/Proj |
|
Binaries:ERS-2xx, ERS-7, GUI |
- API Changes
- LedEngine
now requires a milliseconds argument for flash() and cflash(), added another flash() that takes a value
parameter to specify what level to flash at.
- LoadSave::LoadFile(FILE*
f) and SaveFile(FILE* f)
are renamed LoadFileStream()
and SaveFileStream() to
avoid conflicts with LoadFile/SaveFile(char * filename)
- Bug Fixes:
- TekkotsuMon windows are opening/closing now handled
much more intelligently
- If the robot reboots and you leave a window open,
when the ControllerGUI reconnects it will attempt to relaunch the
server on the Aibo which had opened the window so it can reconnect.
- Solves problems with VisionGUI (RawCam/SegCam)
getting out of sync with the server on the Aibo (clicking the button
would close the server but open the window, or open the server and
close the window... not obvious to the user why it wasn't connecting)
- CameraBehavior
- Uses
static memory to work around apparent large memory allocation bug (in
system libraries?)
- Now
saves raw images using InterleavedYUVGenerator
instead of RawCameraGenerator.
You probably have a better shot at a graphics program being able to
throw away the interleaved header (53 bytes) and then just grabbing the
YCbCr data than you did of having it throw away the RawCamera header
(42 bytes) before each of 3 separate image channels concatenated
together.
- Still saves in an odd little format of our own, I
recommend someone implementing TIFF encoding (which is apparently
pretty easy) if you want lossless image storage on the memory stick.
- A pink ball threshold file for vision segmentation
is now included (ms/config/7red.tm)
- had been prepared for 2.0, but never actually checked in.
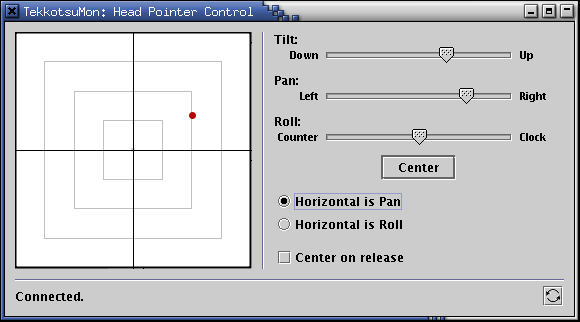
- HeadPointerControllerBehavior
(accessed through HeadPointGUI)
had only been moving the head joints in positive directions (up and to
the left).
- TekkotsuMon windows now reopen at the same place
you last closed them (had been sliding down and to the right each time)
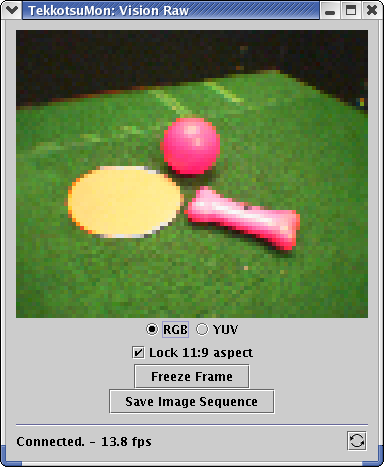
- VisionGUI
will respect the "Lock Aspect Ratio" button
- WorldStateSerializerBehavior
was sending one too few PID duty sensor readings
- Several compilation issues using FILENAME_CASE=upper are now
resolved
- Virtual "A/B Mode LED" on ERS-7 now has a linear
response (had been using the "gamma correction" of the real LEDs)
- The demo behavior, AlanBehavior, had its PostureMC
autopruning, but shouldn't
- SavePostureControl
now interprets paths of the filenames correctly
- seg/VisionTrain.java
compiles now (how'd that get through to release??)
- Benchmarks
for ERS-210 (non-supercore) included
- More
documentation and commenting based on questions from the mailing
list. (Mainly the vision
generators, and LoadSave)
|
2.0
|
|
2004 - 01 - 22
|
Docs:HTML
|
|
Source:Full
Patch: All/Proj |
|
Binaries:ERS-2xx, ERS-7, GUI |
- New Features:
- ERS-7 Support
- Uses the same walk parameters as the 2xx series
(works surprisingly well considering the kinematics haven't been
updated - that's for v2.1)
- For better or worse, we're using the same
ordering for the face LEDs that the underlying SDK uses. The
mapping they chose from index to actual LED is a little odd, but I
didn't see any other mappings clean enough to be worth breaking
compatability with any code that might be ported.
- Make sure the wireless lan switch is 'on'.
Otherwise it will freeze during boot.
- You can use <MODEL-NAME>...</MODEL-NAME> tags in the
config file (/ms/config/tekkotsu.cfg)
to have model-specific settings (e.g. 2xx's use a different color
threshold file than 7's)
- Wildcards work too! For example, select ERS-2xx
series with ERS-2*
- Pipelined vision stages
- Tutorial page
describing layout and usage
- Each stage is an EventGeneratorBase - sends
an event
when updated data is available - next
stage will listen and pick up on its output.
- Makes it easy to handle slower or irregular
processing
- Can fork the pipeline
- Behaviors can tap into vision pipeline at any
stage to do custom processing (vision stages themselves are behaviors)
- There can be multiple versions of each stage
co-existing. Just use a different source ID for each
generator. Examples:
- If we put this on the humanoid, we could have
two RawCameraGenerator's, the left camera could send events from source
ID 0, and the right could send from source ID 1.
- You could segment skin colors and ball colors
separately so ambiguous pixels can be classified both ways
- Each stage is lazy-evaluated and cached, so
the entire filter bank is available at every stage, but only the
minimal
necessary calculations are performed.
- Pipeline is set up in project code (StartupBehavior_SetupVision.cc),
so
you can add/replace individual stages with custom versions easily (and
without disturbing other stages in the pipeline)
- CameraBehavior
demo behavior allows you to quickly save double-res snapshots to memory
stick, just
like a digital camera! (anyone want to try adding the EXIF info too?
;) This is added under the "Background Behaviors" menu.
- Each generator tracks the system frame number so
you can make sure you're comparing the same image in different
generators.
- Included object detector (BallDetectionGenerator)
only processes image if the detector actually has listeners (checks erouter->hasListeners() -
you might want to do this in any high cost generators of your own...)
- VisionGUI work
- JPEG compression
- When saving JPEG images, VisionGUI saves
original JPEG as transmitted instead of recompressing
- Allows full framerate transmission and full
resolution, good for offline processing, such as this final project for
the CMU Computer
Vision class.
- Rewritten protocol for sending images to viewer -
more flexible data types, allows for different compression formats on
each channel and/or each image
- The same protocol is now used for both SegCam
and RawCam, so they can both use the same VisionListener class now.
- Variable
resolutions in vision monitors (so you can
decide to use high-res for a snapshot or low res for bandwidth
conservation) (see !set
command in FAQ)
- More color space
options in Raw Vision (select
individual channels) (see !set command in FAQ)
- Vision ports will stay closed until the
RawCamBehavior is launched, which will then tell the current Controller
to open a VisionGUI. This is mostly for security/privacy reasons.
- New Sensor
Observer allows logging and viewing of sensor information from
Controller ("Sensor Observer" from the "Status Reports" menu)
- You can control which sensor(s) to log
individually
- New PostureEditor
control - a nice example of how
much power is available through the Controller user interface.
Take a look at the code
and its header.
- Allows you to load, save, and edit postures
numerically. This includes the LEDs as well, a good way to
experiment with the new LEDs on the ERS-7.
- EventLogger
now has verbose level 3 - this will show
event type specific information, such as the x,y,a parameters of
LocomotionEvents, or the actual message from a text message.
(It's not omniscient though - if you have custom events, you'll have to
write some code to process them)
- WorldState
has new vel_x, vel_y, vel_a and vel_time fields, and a WorldStateVelDaemon to
receive and process Locomotion and EStop events to manage the fields
correctly.
- The daemon will trap locomtion events sent during
EStop until the EStop is turned off.
- API Changes
- Project Makefile has been updated to allow
libraries
(libjpeg) and some other improvements
- New file and menu: StartupBehavior_SetupVision.cc
- WalkMC now
contains calibration parameters. Currently, only the default walk
is calibrated, and only for the 210. Your mileage may vary
(literally!) on different carpets. But now at least you can have
some hope of dead reckoning successfully, recalibrating if necessary.
- Calibration parameters are stored in walk
parameter files. WalkMC can still read old-format parameter
files, and will assume transparent calibration parameters.
- There is additional code in the StartupBehavior_SetupWalkEdit.cc
file to allow modification of the calibration parameters.
- Also includes an interactive calibrator that
will
automate the process and walk you through most it!
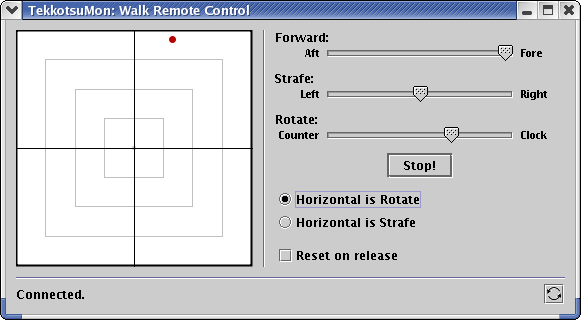
- Walk Remote Control protocol has been modified
-
values are now sent in the range [-1,1] and scaled on the Aibo end to
fill the maximum velocity suggested by the calibration parameters.
- WorldModel2
has been
deprecated
- TextMsgEvents
now use EventBase::statusETID for their type id.
- The BehaviorSwitchControlBase
can now be instantiated directly (no longer abstract)
- This is mainly of use with retained behaviors
which don't need to be recreated (such as in the Vision menu)
- PostureMC now
autoprunes by default (so be sure to pass false for autopruning when you
call MotionManager::addMotion
with a motion command if you want to keep changing its values after its
reached the specified pose/value)
- PIDs now use a global set of shift values. In
short, this means reduced range of values for PID parameters.
Still plenty for all practical purposes, but just not as flexible as
before. Necessitated by the ERS-7's use of one set of shifts for
all joints, and was recommended for earlier models as well (newer
versions of OPEN-R might enforce the ERS-7 way of doing things on the
old models)
- WorldStateSerializer and Serializer interface have
been removed. In their place, a WorldStateSerializerBehavior,
which is event driven (instead of hard coded into MMCombo) and can be
turned on/off from the TekkotsuMon menu.
- The protocol has changed slightly as well.
Previous version assumed 6 sensors, 8 buttons. New version will
send NumPIDJoints, NumSensors, and NumButtons, and then the correct
number of fields.
- See WorldStateSerializerBehavior::processEvent()
to determine exact protocol.
- Bug Fixes:
- Now uses last (most recent) sensor frame from the
frame buffer instead of the first. This shaves 24 ms off of
response time of almost everything in WorldState.
- MotionManager::setOutput(MotionCommand*,
unsigned int, const OutputCmd[NumFrames], const OutputPID&)
was ignoring the PID argument. Now fixed.
- The StateNode based state machine stuff is now
working properly.
- Fixed abort() when sending empty text message (!msg) strings from the
ControllerGUI.
- Profiler was reporting seconds values for
inter-call times, instead of millisecond values like it was supposed
to. Now reports all times in milliseconds.
- Known Bugs:
- VisionGUI and ControllerGUI windows don't quite
reopen in the same place they closed
- VisionGUI has a moderate memory leak when viewing a
JPEG stream.
- Don't use sockets with buffers less than (or equal
to) 256+the number of bytes you want to send.
- There is a very rare freeze-up that can occur when
deactivating the EStop. Cause unknown.
- Perhaps related, the EStopControllerGUI
occassionally drops the first character of some messages (e.g. 'ff' or
'n' instead of 'off' and 'on')
- Crash during destruction (i.e. shutdown) of
RawCameraGenerator after accessing double resolution channel.
Crash occurs in free(),
called from delete.
After several hours of investigation, I blame possible memory problems
with large (130KB) regions
in the underlying system. Investigation continuing.
- VisionGUI doesn't respect "Lock Aspect Ratio"
button.
- ERS-7 specific bugs
- Kinematics have not been updated for ERS-7
(yet). So editing the walk might not be quite straightforward as
usual.
- Color
aberation towards corners of the camera image (example here)
Software correction could be a possibility. This isn't a Tekkotsu
bug, it's just an ERS-7 problem.
- License Change:
- The Tekkotsu source code is now LGPL instead of
GPL. However, code included from other sources, specifically the
included CMPack code, is still GPL, so the WalkMC, Kinematics, and
CMVision code would all have to be replaced before any commercial
behaviors could be released. (these files all contain license notices
so there shouldn't be any confusion)
- Documentation:
|
1.5
|
|
2003 - 10 - 07
|
Docs:HTML
|
|
Source:Full/Patch |
|
Binaries:Memstick, GUI |
- New Features:
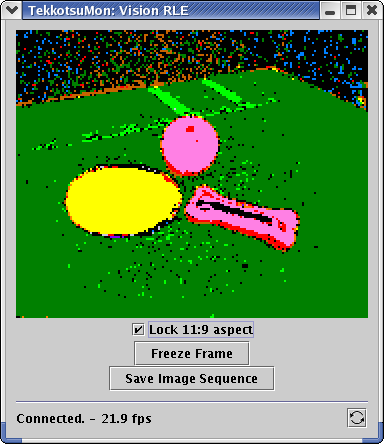
- Vision segmenting
training tool
- Allows you to define
regions directly in color space
- Test segmentation of sample images offline
- Define multiple threshold files, combine them in
various ways
- Significant
improvement of noise detection during segmentation
- Noisy regions are
colored gray - this not only provides for unknown region detection, but
also speeds up processing (one big unknown region instead of hundreds
of tiny regions)
- Small regions
between bigger regions are merged into the bigger region. This
removes noise around object edges, resulting in cleaner objects.
- Watchable memory
- provides ability to display
current values and receive events when they are changed
- A GUI is provided to view all of the primitive
types - allows real time display of values in memory with transparent
usage.
- Implemented by wrapping types in an object which
overrides all of the operators... any time the value is changed, the
object can throw an event if the object is being "watched".
- Now includes Mi-Pal
crash analysis tools (version 2.0.1) courtesy of Griffith
University
- provides stack trace
after a crash using the emon.log
file.
- To use, run tools/crashDebug, which will
mount the memory stick, determine the binary at fault, create the
disassembly, run the stack trace, and then unmount the memory stick
(pass -h to get usage
info)
- Build system reorganized
- Distributed
builds available
- One Makefile in project directory, builds
framework and project
- BUILD_TEKKOTSU
environment variable obsolete
- this functionality is now always on
- TARGET_MODEL
environment variable obsolete
- Now checks a file named TARGET_MODEL in TEKKOTSU_ROOT - this way if you
change the target, everything will be recompiled automatically.
- Rounds all ms/ modification times up to even
seconds to avoid repeated copying of unchanged files to memory stick
- Contribution from Pennsylvania
Governor's School for the Sciences, 2003 Computer Science team
project: "See, Spot; Run"
- Runtime WalkMC parameter editor (imported into
mainline)
- "Walk Edit" menu contains ValueEditControls for each
of the 50 walk parameters
- New walks added: Pace.prm and Tiger.prm;
Pace (video here) is quite nice, and
very low vibration, although not entirely
stable. Tiger is an extremely smooth crawl gait, but not good at
turning
- Line following (not imported into mainline)
- Receives segmented images over wireless,
processes in Java, sends walk commands back over wireless
- Paper: doc/pdf; Presentation: ppt/pdf
- Team members: Haoqian Chen, Elena Glassman,
Chengjou Liao,
Yantiamn Martin, Lisa Shank, Jonathan Stahlman
- Team project leaders:
P. Matt Jennings and Ethan Tira-Thompson
- Controller GUI
scripts implemented (was previously called "bookmarks")
- Any script(s) named "STARTUP" will be run the
first
time the GUI connects
- Any script(s) named "CONNECT" will be run
every time
the GUI makes a connection
- This can be nice so you can have full default
menus and retain
demo behaviors, but still start off in a submenu relating to your
project, and you can automatically bring up additional GUIs on boot.
- Use a single ';' to separate multiple
commands. (must be its own argument - will be considered part of
other arguments if there is no whitespace. '\\;' if you need a
literal ';' argument)
- Added speed limiter to HeadPointerMC to help
protect neck joints. Also added config variables to control
maximum speed. See max_head_*_speed
in project/ms/config/tekkotsu.cfg
- Colorized
errors/warnings in build output (run tools/cmake instead of make)
- default colors are best for reverse video (white
text on black) but you can change them easily in tools/colorfilt
- You can now type
option names as well as indexes on the console
- API Changes:
- Reorganized TekkotsuMon using Java packages
- Better Aibo 3D
integration -
the Aibo3D GUI comes up whenever you launch the "server" on the Aibo,
instead of then having to launch it manually
- Now uses java.util.prefs to remember window
positions
- breaks MATLAB tools - see known bugs
- Remove need for vision->enableEvents()
calls
(hackish for now, eventually Vision will just check erouter->hasListeners())
- Aibo3D Monitor and
Aibo3D Controller have been merged (always monitors joints, except when
you
control them by dragging a joint around in the window)
- Bug Fixes:
- Support for the new version of OPEN-R SDK 1.1.4-r1
- only minor change was needed regarding
introduction of new image
channels
- Controls no longer crash if they have no submenus
but return non-NULL upon activation
- May have finally killed occasional ControllerGUI's
ArrayIndexOutOfBoundsException
- Behaviors based on StateNode no longer hang on
launch
- Outgoing connections now can receive data (thanks
to Andrew Cristina and the group from UNO.)
- If a header file is missing, the build process will
give a nice error and stop instead of repeatedly making the first
dependency file that refers to it.
- Fixed possible crash if shutting down while playing
sound
- Blocking output (serr) now gives correct output
- had been repeating output, issue with non-blocking remains (see known
bugs)
- Memory is now freed properly after saving an image
sequence from VisionGUI
- Known Bugs: (you can help!)
- Blocking output doesn't actually block - it
just isn't buffered as much?
- StateNode stuff is unstable - doesn't do
reference counting properly somewhere
- MATLAB links to Java components is broken - Java
stuff is in packages now, MATLAB can't find appropriate files.
- To solve, does anyone know how to direct MATLAB
to find a class in a package?
- To
workaround, may simply need to move Listener.class files back into same
directory as MATLAB's .m files (tools/mon).
- When a new WalkMC is started, it has a tendancy to
try to straighten the legs first
- In Aibo3D, the knee joint position shown is offset
from the real value
- If you stop and restart the WMMonitorBehavior, the
GUI will lose all the wmVar's.
|
1.4
|
|
2003 - 07 - 08 |
Docs:PDF/HTML
|
|
Source:Full/Patch |
|
Binaries:Memstick, GUI |
- New Features:
- Raw Vision and Segmented Vision TekkotsuMon
modules ported to Java
- Screen shots
- Raw vision can be viewed in RGB or YUV color
spaces
- Image sequences can be saved for later processing
- Controller pop-up windows for custom GUIs for
specific controls, error messages
- Protocol is documented on the Controller's page.
- Same protocol is used by both human console
connection (port 10001) and ControllerGUI
- New GUIs:
- MechaControl ported to Java (renamed WalkGUI) - screen shot
- Head Pointer GUI - screen
shot
- ControllerMsg - simple class for putting up
messages - screen shot
- EStop GUI - lets you pause/unpause remotely... - screen shot
- No roboticist should be without a big red
panic button! ;)
- Updated profiler benchmarks (in docs/profilerun*)
- Better support for the OPENRSDK_ROOT environment
variable, in case you can't install the SDK at the default location
(/usr/local/OPEN_R_SDK)
- Bug Fixes:
- Improved FTP update support (from the Sony Sample
code - tools/mstreeput)
- ToggleHeadLightBehavior should now turn the
headlight off correctly
|
1.3
|
|
2003 - 06 - 13 |
|
|
Source
|
|
Memstick
|
- New Features:
- Reworked Control system - see the updated TekkotsuMon Tutorial
- Added GUI for Controller menus
- Takes input from Tekkotsu's console_port
(default port 10001) if GUI not active (so UI doesn't require the 'G'),
redirects to the system console (port 59000) otherwise
- We are beginning to move Tekkotsu output to
10001 port to separate it from the system console to reduce confusion
between the two. This will take some time.
- For now, you will still need to telnet to port
59000 to see output of most controls.
- Variety of new controls
- 3D Remote Posing
- You will need to install the Java3D
package
- To move Aibo on screen ("puppeteer"): tools/aibo3d/Aibo3DPick
- To view Aibo on screen (monitor): tools/aibo3d/Aibo3D
- Additional ERS-220 support
- Thanks to the CMU Robosoccer team for letting us
borrow one of their 2002 RoboCup prizes (an ERS-220) to test this
release!
- Integrated Daishi MORI's 1.2 patch (added support
for buttons, LEDs, etc.) (Thanks Daishi!)
- Dual booting on 220 and 210 without recompile
- Uses some artful namespace management and a
couple #ifdef's (user
code
shouldn't need any #ifdef's)
- There are now three possible values for TEKKOTSU_TARGET_MODEL
environment variable:
- TGT_ERS210
- TGT_ERS220
- TGT_ERS2xx
- The TGT_ERS2xx
target is a union of the features of each. It may run slightly
slower and use slightly more memory than one of the optimized targets,
but this should not be noticable.
- TGT_ERS2xx
is now the default choice if TEKKOTSU_TARGET_MODEL
is unset.
- Remember to do a clean compile when switching
build targets
- Added a control specifically to pop up that
little headlight, because it's so darn cool ;)
- safemot tool - inserts time into MotionSequences so
they don't exceed Sony's safety guidelines. (or a given percentage
thereof - you can "overclock" the motions too ;)
- This mostly fixes the converted CMPack'02
motion files
not playing correctly (but you may want to turn up the speed some
more...)
- API Changes:
- std::string
is now used in place of char*
in ControlBase and BehaviorBase
- Controller
will call doSelect, doNextItem, etc. directly on ControlBase subclasses
instead of passing the event which triggered the action to
ControlBase::processControlEvent.
- Added facility to controls to pass arguments to
them from user input
- Added getDescription to ControlBase and
BehaviorBase to allow short descriptions of the corresponding object to
be given to the user
- Behaviors should no longer prepend '#' or '-' to
their names to show if they are running or not. This
functionality
has been moved to the BehaviorSwitchControl instead.
- WorldState now has a robotDesign bitmask, with
corresponding ERS210Mask
and ERS220Mask to check
which model is running your code.
- The CONSOLE_VT100
compiler flag has been removed. It is replaced by a config
variable: Config::main.use_VT100
- Bug Fixes:
- Build now halts on linker errors
- Tail and ears re-enabled on 210 (oops)
- Finally fixed crash on shutdown! Things
destruct nicely now ;)
- Added a "gamma correction" of 2 for LEDs - we see
single blinks better than single flickers - eyes have after images and
all that...
- Known Bugs:
- Controller GUI occasionally dumps a stack trace
when you go from a menu with hilighted items to one with fewer items
than the hilight. Don't know why it happens, but it's
uncommon. (some kind of thread race condition I assume)
- 220's do a bit more "stuttering" on start up than
the 210's do. I'm not sure why this would be the case.
Anyway, it's a cosmetic issue... if you like, turn off the startup
sound, or make it delay a few hundred milliseconds.
|
1.2
|
|
2003 - 04 - 29 |
|
|
Source
|
|
Memstick
|
- Update 2003-05-04: Patch set supporting additional
LEDs and buttons on ERS-220
- New Features
- Doubled code speed (roughly)
- Turned on -O2 flags for all modules
except MMCombo, which crashes when optimizations are on. (open problem
if someone wants to figure that out - it's not a performance
bottleneck,
so that's on the back burner)
- New tool to convert CMPack'02 motion keyframes into
Tekkotsu's MotionSequences.
- May still need some tweaking to get speed
correct, I
think CMPack waits until robot reaches keyframe before moving on,
whereas Tekkotsu will just target the next keyframe to maintain time
sync. Volunteers? ;)
- Converted files in project/ms/data/motion
- Originals are in tools/convertmot
- New background behavior AutoGetupBehavior (source)
- Detects when robot has fallen over, and
executes appropriate get-up script
- Currently uses the CMPack'02 get-up scripts
from above
- New FileBrowserControl
(header, implementation)
- Now base class for LoadPostureControl,
RunMotionSequenceControl, PlaySoundControl (new)
- Allows you to browse files on memory stick
instead of
having to type filename from memory; also eliminates need to move from
robot to keyboard
- Integrated Daishi
MORI's patches
- ERS-220 support
- A recompile is necessary to switch between
models
- The TEKKOTSU_TARGET_MODEL
environment
variable determines which header to load. Valid values are:
- TGT_ERS220
- TGT_ERS210 (default)
- Cygwin support, still need to stop memsticks
manually
- Automatic memstick mount/unmount under Mac OS X
- Fixed 1.1 issues:
- Killed bug which would occasionally cause
infinite looping in Makefiles during make
clean - thanks Daishi
- Now using more realistic parameters for the low
battery
warning behavior BatteryMonitorBehavior
(if you see the ears flicking back and forth, your battery is getting
low. The frequency increases as the battery drops)
- Known issues:
- Twitches after loading a motion sequence from the
menu
system. Need to make MotionSequence send an event when it reaches end
of
the sequence, so it can hold the position until estop is updated.
(fixed: 1.3)
- Crashes after exiting some StateNode based
behaviors
(i.e. BanditBehavior and WorldModel) (exp fix: 1.3)
|
1.1
|
|
2003 - 04 - 09 |
|
|
Source |
|
Memstick |
- Update 2003-04-12: Patch set for cygwin and/or
ERS-220 model support is available
- New Features:
- TekkotsuMon (PC
monitoring tools)
- TCP/IP and RemoteProcessing (RP-OPENR) support
- Communicate with networked resources
- Sound Output!
- Automatic mixing of multiple concurrent sounds
- Reference counting of sound files to save memory
- Supports dynamic (real-time/synthesized) sound
sources
as well as WAV
- Documentation:
- Can now send events to behaviors in Main process
from
other processes and from MotionCommands. New event generators:
- audioEGID - sound start/end, status events as
chained sounds end
- motmanEGID - MotionCommand added/removed
- estopEGID - Emergency Stop on/off
- locomotionEGID - For MotionCommands that cause
movement
through the world, (e.g. WalkMC) this allows dead reconning to be
reported.
- WorldModel2
- Beta components: spherical depth map, horizontal
height map
- Alpha components: FastSLAM localization, global
map
- API Changes:
- Fixed 0.8 Issues:
- Profiler
inter-call times
- Finished switch to floats
- Known Issues:
- Compiler optimizations turned off (crashes
otherwise) (fixed: 1.2)
- Blocking TCP/IP read()'s block until framework
buffer is
full instead of user buffer is full. (exp fix 1.2)
- Low battery warning doesn't do its job (fixed 1.2)
|
0.95
|
|
2003 - 03 -04
|
|
|
Source |
|
Memstick |
- Update 2003-04-10: Patch set for cygwin and/or
ERS-220 model support is available
- First publicly announced release
- New Features:
- Improved MotionManager API - better performance and
ease of use
- Motion system mostly switched over to floats
instead of
doubles
- Makefile automatically copies OS files to memstick
when
needed (when using the 'update' target)
- Fixed 0.8 Issues:
- Ported to recent OPEN-R release with GCC 3.2
- New build system separates user's local development
from framework files
- Defaults to a more general pink ball only vision
configuration
|
0.8
|
|
2003 - 02 - 24
|
|
|
Source
|
|
Memstick
|
- Preview release
- Known Issues:
- Not tested under most recent OPEN-R release (fixed:
0.95)
- PC-side monitoring tools delayed to add TCP-Gateway
support. (fixed: 1.1)
- Should separate "user" files and "Tekkotsu" files,
need
to modify build system (fixed: 0.95)
- Pink ball vision config file not included (still
using
our lab-colors config) (fixed: 0.95)
- Profiler does not track inter-call time (and thus
calls
per second) (fix: 1.1)
- Makefile should alert user if memstick lacks OS
(fixed:
0.95)
- Occasional crashes during shutdown (exp. fix: on
backburner)
- Consistently happens on non-supercore, sporadic
on supercore
- We use a lot of doubles, should switch to floats
(fixed:
1.1)
- (in older versions of OPEN-R, errors occured
using floats in library calls, now seem to be
resolved)
|
Beta
|
|
2003 - 02 and
prior
|
|
|
Not
|
|
Released
|
|
|
|
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}