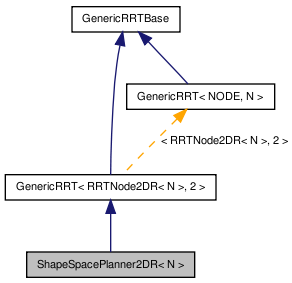
ShapeSpacePlanner2DR< N > Class Template Reference
Plans a path in a n-dimensional angular space, uses forward kinematics for collision testing. More...
#include <ShapeSpacePlanner2DR.h>
Detailed Description
template<size_t N>
class ShapeSpacePlanner2DR< N >
Plans a path in a n-dimensional angular space, uses forward kinematics for collision testing.
Definition at line 389 of file ShapeSpacePlanner2DR.h.
Public Types | |
| typedef RRTNode2DR< N > | NodeType_t |
| typedef NodeType_t::NodeValue_t | NodeValue_t |
| typedef GenericRRTBase::PlannerResult< 2 > | PlannerResult |
Public Member Functions | |
| ShapeSpacePlanner2DR (DualCoding::ShapeSpace &shs, const DualCoding::Shape< DualCoding::PolygonData > &worldBounds, float inflation, unsigned int effectorOffset, AdmissibilityPredicate< NodeType_t > *predicate=NULL) | |
| ShapeSpacePlanner2DR (const ShapeSpacePlanner2DR &other) | |
| ShapeSpacePlanner2DR | operator= (const ShapeSpacePlanner2DR &other) |
| virtual | ~ShapeSpacePlanner2DR () |
| PlannerResult | planPath (NodeValue_t start, NodeValue_t end, NodeValue_t interpolationStep, const fmat::Transform &_worldT, unsigned int _maxIterations=40000, std::vector< NodeValue_t > *pathResult=NULL, std::vector< NodeType_t > *treeStartResult=NULL, std::vector< NodeType_t > *treeEndResult=NULL) |
| void | plotTree (const std::vector< NodeType_t > &tree, Shape< GraphicsData > &graphics, rgb color=rgb(255, 0, 0)) |
| Populates a Shape<GraphicsData> with BoundingBoxes. | |
| void | plotPath (const std::vector< NodeValue_t > &tree, Shape< GraphicsData > &graphics, rgb color=rgb(255, 0, 0)) |
| Populates a Shape<GraphicsData> with BoundingBoxes. | |
| void | getBoxes (std::vector< std::vector< std::pair< float, float > > > &boxes, const KinematicJoint &joint) |
| Returns BoundingBox of each link, for plotTree(). | |
Public Attributes | |
| KinematicJoint * | joints [N] |
| fmat::Transform | worldT |
Member Typedef Documentation
| typedef RRTNode2DR<N> ShapeSpacePlanner2DR< N >::NodeType_t |
Definition at line 391 of file ShapeSpacePlanner2DR.h.
| typedef NodeType_t::NodeValue_t ShapeSpacePlanner2DR< N >::NodeValue_t |
Reimplemented from GenericRRT< RRTNode2DR< N >, 2 >.
Definition at line 392 of file ShapeSpacePlanner2DR.h.
| typedef GenericRRTBase::PlannerResult<2> ShapeSpacePlanner2DR< N >::PlannerResult |
Definition at line 393 of file ShapeSpacePlanner2DR.h.
Constructor & Destructor Documentation
| ShapeSpacePlanner2DR< N >::ShapeSpacePlanner2DR | ( | DualCoding::ShapeSpace & | shs, | |
| const DualCoding::Shape< DualCoding::PolygonData > & | worldBounds, | |||
| float | inflation, | |||
| unsigned int | effectorOffset, | |||
| AdmissibilityPredicate< NodeType_t > * | predicate = NULL | |||
| ) |
Definition at line 444 of file ShapeSpacePlanner2DR.h.
| ShapeSpacePlanner2DR< N >::ShapeSpacePlanner2DR | ( | const ShapeSpacePlanner2DR< N > & | other | ) |
Definition at line 401 of file ShapeSpacePlanner2DR.h.
| virtual ShapeSpacePlanner2DR< N >::~ShapeSpacePlanner2DR | ( | ) | [virtual] |
Definition at line 415 of file ShapeSpacePlanner2DR.h.
Member Function Documentation
| void ShapeSpacePlanner2DR< N >::getBoxes | ( | std::vector< std::vector< std::pair< float, float > > > & | boxes, | |
| const KinematicJoint & | joint | |||
| ) |
Returns BoundingBox of each link, for plotTree().
Definition at line 539 of file ShapeSpacePlanner2DR.h.
Referenced by ShapeSpacePlanner2DR< N >::plotPath(), and ShapeSpacePlanner2DR< N >::plotTree().
| ShapeSpacePlanner2DR ShapeSpacePlanner2DR< N >::operator= | ( | const ShapeSpacePlanner2DR< N > & | other | ) |
Definition at line 406 of file ShapeSpacePlanner2DR.h.
| ShapeSpacePlanner2DR< N >::PlannerResult ShapeSpacePlanner2DR< N >::planPath | ( | NodeValue_t | start, | |
| NodeValue_t | end, | |||
| NodeValue_t | interpolationStep, | |||
| const fmat::Transform & | _worldT, | |||
| unsigned int | _maxIterations = 40000, |
|||
| std::vector< NodeValue_t > * | pathResult = NULL, |
|||
| std::vector< NodeType_t > * | treeStartResult = NULL, |
|||
| std::vector< NodeType_t > * | treeEndResult = NULL | |||
| ) |
Definition at line 470 of file ShapeSpacePlanner2DR.h.
| void ShapeSpacePlanner2DR< N >::plotPath | ( | const std::vector< NodeValue_t > & | tree, | |
| Shape< GraphicsData > & | graphics, | |||
| rgb | color = rgb(255,0,0) | |||
| ) |
Populates a Shape<GraphicsData> with BoundingBoxes.
Definition at line 506 of file ShapeSpacePlanner2DR.h.
| void ShapeSpacePlanner2DR< N >::plotTree | ( | const std::vector< NodeType_t > & | tree, | |
| Shape< GraphicsData > & | graphics, | |||
| rgb | color = rgb(255,0,0) | |||
| ) |
Populates a Shape<GraphicsData> with BoundingBoxes.
Definition at line 486 of file ShapeSpacePlanner2DR.h.
Member Data Documentation
| KinematicJoint* ShapeSpacePlanner2DR< N >::joints[N] |
Definition at line 412 of file ShapeSpacePlanner2DR.h.
Referenced by ShapeSpacePlanner2DR< N >::operator=(), ShapeSpacePlanner2DR< N >::plotPath(), ShapeSpacePlanner2DR< N >::plotTree(), and ShapeSpacePlanner2DR< N >::ShapeSpacePlanner2DR().
| fmat::Transform ShapeSpacePlanner2DR< N >::worldT |
Definition at line 413 of file ShapeSpacePlanner2DR.h.
Referenced by ShapeSpacePlanner2DR< N >::getBoxes(), ShapeSpacePlanner2DR< N >::planPath(), and ShapeSpacePlanner2DR< N >::plotPath().
The documentation for this class was generated from the following file: