Behaviors Directory Reference
Directories | |
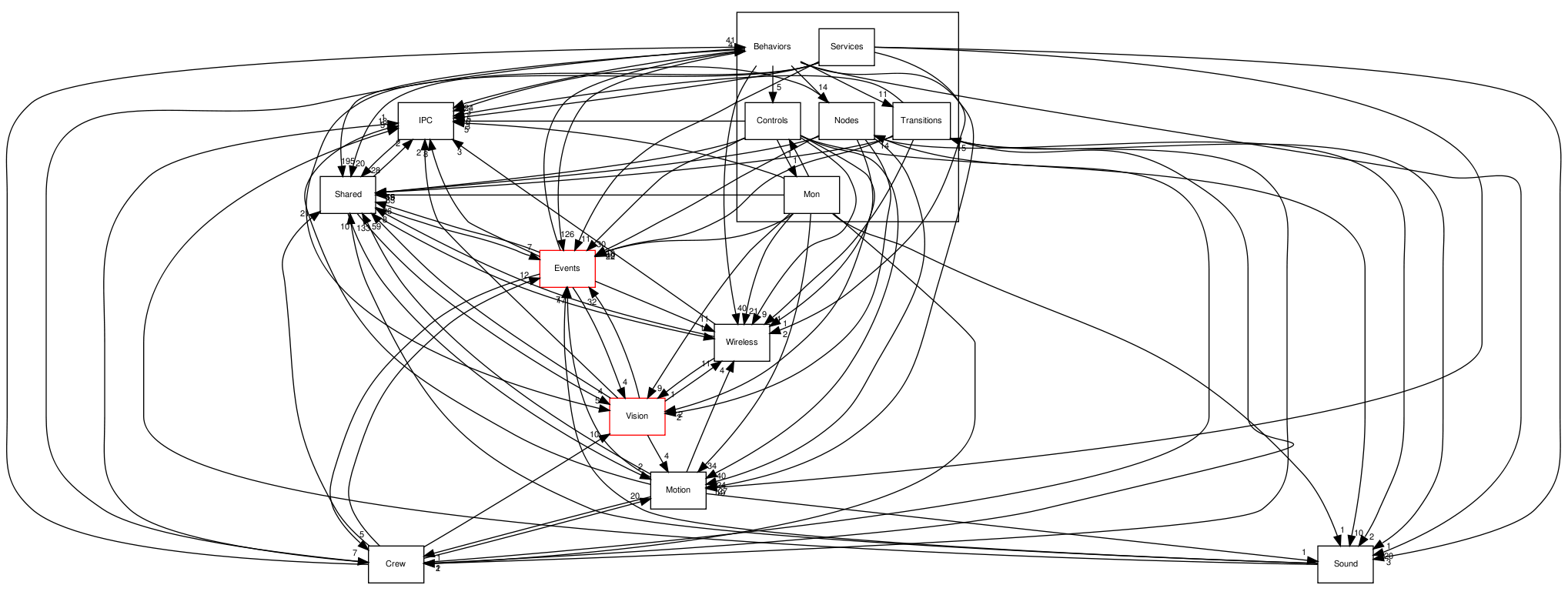
| directory | Controls |
| directory | Mon |
| directory | Nodes |
| directory | Services |
| directory | Transitions |
Files | |
| file | BehaviorBase.cc [code] |
Implements BehaviorBase from which all Behaviors should inherit. | |
| file | BehaviorBase.h [code] |
Describes BehaviorBase from which all Behaviors should inherit. | |
| file | Controller.cc [code] |
Implements Controller class, a behavior that should be started whenever the emergency stop goes on to provide menus for robot control. | |
| file | Controller.h [code] |
Describes Controller class, a behavior that should be started whenever the emergency stop goes on to provide menus for robot control. | |
| file | StateMachine.h [code] |
| file | StateNode.cc [code] |
Describes StateNode, which is both a state machine controller as well as a node within a state machine itself. | |
| file | StateNode.h [code] |
Describes StateNode, which is both a state machine controller as well as a node within a state machine itself. | |
| file | Transition.cc [code] |
Implements Transition, represents a transition between StateNodes. | |
| file | Transition.h [code] |
Describes Transition, represents a transition between StateNodes. | |