MCNode.cc File Reference
Implement's MCNode's default name and description strings (the class is templated, so everything else has to go in the header). More...
#include "MCNode.h"#include "Events/EventRouter.h"#include "Shared/MarkScope.h"#include "Shared/RobotInfo.h"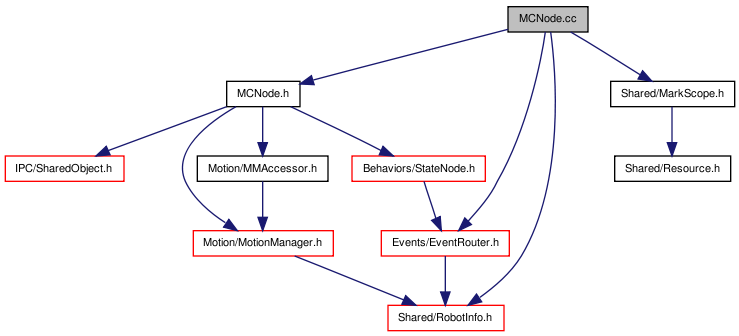
Go to the source code of this file.
Variables | |
| const char | defHeadPointerNodeName [] = "HeadPointerNode" |
| name for HeadPointerNode to pass as template argument | |
| const char | defHeadPointerNodeDesc [] = "Manages a HeadPointerMC to look in a given direction each time the node is activated" |
| description for HeadPointerNode to pass as template argument | |
| const char | defPIDNodeName [] = "PIDNode" |
| name for PIDNode to pass as template argument | |
| const char | defPIDNodeDesc [] = "Manages a PIDMC to set joint power levels when the node is activated" |
| description for PIDNode to pass as template argument | |
| const char | defCrabArmNodeName [] = "CrabArmNode" |
| name for CrabArmNode to pass as template argument | |
| const char | defCrabArmNodeDesc [] = "Manages a CrabArmMC to reach in a given direction each time the node is activated" |
| description for CrabArmNode to pass as template argument | |
| const char | defArmNodeName [] = "ArmNode" |
| name for ArmNode to pass as template argument | |
| const char | defArmNodeDesc [] = "Manages an ArmMC to reach in a given direction each time the node is activated" |
| description for ArmNode to pass as template argument | |
| const char | defTailWagNodeName [] = "TailWagNode" |
| name for TailWagNode to pass as template argument | |
| const char | defTailWagNodeDesc [] = "Wags the tail for as long as the state is active" |
| description for TailWagNode to pass as template argument | |
| const char | defPostureNodeName [] = "PostureNode" |
| name for PostureNode to pass as template argument | |
| const char | defPostureNodeDesc [] = "Moves the body to the specified posture" |
| description for PostureNode to pass as template argument | |
| const char | defMotionSequenceNodeName [] = "MotionSequenceNode" |
| name for MotionSequenceNode to pass as template argument | |
| const char | defMotionSequenceNodeDesc [] = "Moves the body through the specified motion sequence" |
| description for MotionSequenceNode to pass as template argument | |
| const char | defDynamicMotionSequenceNodeName [] = "DynamicMotionSequenceNode" |
| name for DynamicMotionSequenceNode to pass as template argument | |
| const char | defDynamicMotionSequenceNodeDesc [] = "Moves the body through the specified dynamic motion sequence" |
| description for DynamicMotionSequenceNode to pass as template argument | |
| const char | defWalkNodeName [] = "WalkNode" |
| name for WalkNode to pass as template argument | |
| const char | defWalkNodeDesc [] = "Manages a WalkMC node to walk in a direction each time the node is activated." |
| description for WalkNode to pass as template argument | |
| const char | defWaypointWalkNodeName [] = "WaypointWalkNode" |
| name for WaypointWalkNode to pass as template argument | |
| const char | defWaypointWalkNodeDesc [] = "Manages a WaypointWalkMC to perform a waypoint walk each time the node is activated." |
| description for WaypointWalkNode to pass as template argument | |
Detailed Description
Implement's MCNode's default name and description strings (the class is templated, so everything else has to go in the header).
Definition in file MCNode.cc.
Variable Documentation
| const char defArmNodeDesc[] = "Manages an ArmMC to reach in a given direction each time the node is activated" |
description for ArmNode to pass as template argument
| const char defArmNodeName[] = "ArmNode" |
name for ArmNode to pass as template argument
| const char defCrabArmNodeDesc[] = "Manages a CrabArmMC to reach in a given direction each time the node is activated" |
description for CrabArmNode to pass as template argument
| const char defCrabArmNodeName[] = "CrabArmNode" |
name for CrabArmNode to pass as template argument
| const char defDynamicMotionSequenceNodeDesc[] = "Moves the body through the specified dynamic motion sequence" |
description for DynamicMotionSequenceNode to pass as template argument
| const char defDynamicMotionSequenceNodeName[] = "DynamicMotionSequenceNode" |
name for DynamicMotionSequenceNode to pass as template argument
| const char defHeadPointerNodeDesc[] = "Manages a HeadPointerMC to look in a given direction each time the node is activated" |
description for HeadPointerNode to pass as template argument
| const char defHeadPointerNodeName[] = "HeadPointerNode" |
name for HeadPointerNode to pass as template argument
| const char defMotionSequenceNodeDesc[] = "Moves the body through the specified motion sequence" |
description for MotionSequenceNode to pass as template argument
Referenced by MotionSequenceNode< SIZE >::doEvent(), MotionSequenceNode< SIZE >::MotionSequenceNode(), MotionSequenceNode< SIZE >::postStart(), MotionSequenceNode< SIZE >::preStart(), and MotionSequenceNode< SIZE >::update().
| const char defMotionSequenceNodeName[] = "MotionSequenceNode" |
name for MotionSequenceNode to pass as template argument
Referenced by MotionSequenceNode< SIZE >::doEvent(), MotionSequenceNode< SIZE >::MotionSequenceNode(), MotionSequenceNode< SIZE >::postStart(), MotionSequenceNode< SIZE >::preStart(), and MotionSequenceNode< SIZE >::update().
| const char defPIDNodeDesc[] = "Manages a PIDMC to set joint power levels when the node is activated" |
description for PIDNode to pass as template argument
Referenced by PIDNode::PIDNode().
| const char defPIDNodeName[] = "PIDNode" |
name for PIDNode to pass as template argument
Referenced by PIDNode::PIDNode().
| const char defPostureNodeDesc[] = "Moves the body to the specified posture" |
description for PostureNode to pass as template argument
Referenced by PostureNode::PostureNode().
| const char defPostureNodeName[] = "PostureNode" |
name for PostureNode to pass as template argument
Referenced by PostureNode::PostureNode().
| const char defTailWagNodeDesc[] = "Wags the tail for as long as the state is active" |
description for TailWagNode to pass as template argument
Referenced by TailWagNode::TailWagNode().
| const char defTailWagNodeName[] = "TailWagNode" |
name for TailWagNode to pass as template argument
Referenced by TailWagNode::TailWagNode().
| const char defWalkNodeDesc[] = "Manages a WalkMC node to walk in a direction each time the node is activated." |
description for WalkNode to pass as template argument
Referenced by WalkNode::WalkNode().
| const char defWalkNodeName[] = "WalkNode" |
name for WalkNode to pass as template argument
Referenced by WalkNode::WalkNode().
| const char defWaypointWalkNodeDesc[] = "Manages a WaypointWalkMC to perform a waypoint walk each time the node is activated." |
description for WaypointWalkNode to pass as template argument
| const char defWaypointWalkNodeName[] = "WaypointWalkNode" |
name for WaypointWalkNode to pass as template argument