RobotInfo.cc File Reference
#include "RobotInfo.h"#include <iostream>#include "ERS210Info.h"#include "ERS220Info.h"#include "ERS2xxInfo.h"#include "CommonERSInfo.h"#include <cmath>#include <cstdlib>#include "CommonInfo.h"#include <stdlib.h>#include "CalliopeInfo.h"#include "Calliope3Components.h"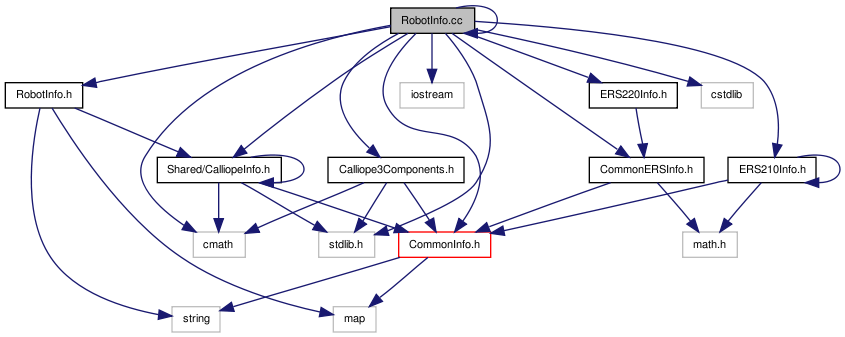

Go to the source code of this file.
Namespaces | |
| namespace | ERS210Info |
Contains information about the ERS-210 Robot, such as number of joints, PID defaults, timing information, etc. | |
| namespace | ERS220Info |
Contains information about the ERS-220 Robot, such as number of joints, PID defaults, timing information, etc. | |
| namespace | ERS2xxInfo |
Contains information about the ERS-2xx series of robot, such as number of joints, PID defaults, timing information, etc. | |
| namespace | ERS7Info |
Contains information about the ERS-7 Robot, such as number of joints, PID defaults, timing information, etc. | |
| namespace | LynxArm6Info |
Declares configuration of the 6-DOF PUMA style arm from Lynx Motion, such as number of joints, LEDs, etc. | |
| namespace | Regis1Info |
Declares configuration of the Regis robot prototype, such as number of joints, LEDs, etc. | |
| namespace | QBotPlusInfo |
Declares configuration of the QwerkBot+, such as number of joints, LEDs, etc. | |
| namespace | QwerkInfo |
Declares configuration of the generic Qwerk target, such as number of joints, LEDs, etc. | |
| namespace | CreateInfo |
Contains information about an iRobot Create, such as number of joints, LEDs, etc. | |
| namespace | CalliopeInfo |
Basic Calliope with no arm, fixed netbook camera, without AX-S1 sensors. | |
| namespace | CalliopeLPInfo |
Calliope with no arm, Logitech camera on pan/tilt, AX-S1 sensors. | |
| namespace | CalliopeSPInfo |
Calliope with no arm, Sony Playstation camera on pan/tilt, AX-S1 sensors. | |
| namespace | Calliope2SPInfo |
Calliope with 2DOF arm, Sony Playstation camera on pan/tilt, AX-S1 sensors. | |
| namespace | Calliope5SPInfo |
Calliope with 5DOF arm, Sony Playstation camera on pan/tilt, AX-S1 sensors. | |
| namespace | Calliope5KPInfo |
Calliope with 5DOF arm, Kinect camera on pan/tilt, without AX-S1 sensors. | |
| namespace | Calliope3Info |
Calliope with 2DOF arm and Microsof LifeCam camera on pan/tilt. | |
| namespace | CalliopeUInfo |
Contains information about the CalliopeU, such as number of joints, LEDs, etc. | |
| namespace | WiiMoteInfo |
Contains information about the WiiMote remote control. | |
| namespace | BioloidInfo |
Declares configuration of generic bioloid/dynamixel based robots, such as number of joints, LEDs, etc. | |
| namespace | PanTiltInfo |
Declares configuration of a pan/tilt camera “robot”, such as number of joints, LEDs, etc. | |
| namespace | HandEyeInfo |
Declares configuration of the HandEye planar arm robot, such as number of joints, LEDs, etc. | |
| namespace | HandEyeZInfo |
Declares configuration of the modified HandEye planar arm robot, such as number of joints, LEDs, etc. | |
| namespace | TentacleInfo |
Declares configuration of the tentacle planar arm, such as number of joints, LEDs, etc. | |
| namespace | ChiaraInfo |
Contains information about an Chiara hexapod robot, such as number of joints, LEDs, etc. | |
| namespace | Chiara2Info |
Contains information about an Chiara hexapod robot, such as number of joints, LEDs, etc. | |
| namespace | KHR2Info |
Contains information about an KHR2 humanoid robot, such as number of joints, LEDs, etc. | |
| namespace | MantisArmInfo |
Contains information about an Mantis Arm robot, such as number of joints, LEDs, etc. | |
| namespace | MantisLegInfo |
Contains information about an Mantis Leg robot, such as number of joints, LEDs, etc. | |
| namespace | MantisInfo |
Contains information about a Mantis robot, such as number of joints, LEDs, etc. | |
| namespace | CameraGeneric60 |
parameters for a 60° horizontal field of view, 4:3 aspect ratio camera | |
| namespace | Camera75DOF |
parameters for a 75° diagonal field of view, 4:3 aspect ratio camera, like Logitech QuickCam Pro 9000 or Communicate Deluxe | |
| namespace | CameraKinect |
parameters for Microsoft Kinect | |
| namespace | CameraSTX |
parameters for a 42° by 31.5° camera, like Logitech Communicate STX, note that these specifications indicate either a mistake or non-square pixels... | |
| namespace | CameraERS2xx |
| namespace | CameraLifeCam |
parameters for a 66° camera, like the Microsoft LifeCam, with a 16:9 aspect ratio | |
| namespace | RobotInfo |
Contains information about the robot, such as number of joints, PID defaults, timing information, etc. | |
Functions | |
| const Capabilities | LynxArm6Info::capabilities (TargetName, NumReferenceFrames, outputNames, NumButtons, buttonNames, NumSensors, sensorNames, PIDJointOffset, NumPIDJoints, 0, 0, NumOutputs) |
| const Capabilities | QwerkInfo::capabilities (TargetName, NumReferenceFrames, outputNames, NumButtons, buttonNames, NumSensors, sensorNames, PIDJointOffset, NumPIDJoints, LEDOffset, NumLEDs, NumOutputs) |
| const Capabilities | CreateInfo::capabilities (TargetName, NumReferenceFrames, outputNames, NumButtons, buttonNames, NumSensors, sensorNames, PIDJointOffset, NumPIDJoints, LEDOffset, NumLEDs, NumOutputs) |
| const Capabilities | BioloidInfo::capabilities (TargetName, NumReferenceFrames, outputNames, NumButtons, buttonNames, NumSensors, sensorNames, PIDJointOffset, NumPIDJoints, LEDOffset, NumLEDs, NumOutputs) |
| const Capabilities | PanTiltInfo::capabilities (TargetName, NumReferenceFrames, outputNames, NumButtons, buttonNames, NumSensors, sensorNames, PIDJointOffset, NumPIDJoints, LEDOffset, NumLEDs, NumOutputs) |
| const Capabilities | KHR2Info::capabilities (TargetName, NumReferenceFrames, outputNames, NumButtons, buttonNames, NumSensors, sensorNames, PIDJointOffset, NumPIDJoints, LEDOffset, NumLEDs, NumOutputs) |
| const char *const | RobotInfo::detectModel () |
| Some target models, such as ERS2xxInfo, may be dual-booting compatability modes. This function returns the actual robot name (e.g. ERS210Info::TargetName or ERS220Info::TargetName). | |
Variables | |
| const char *const | WiiMoteInfo::TargetName = "WiiMote" |
| the name of the model, to be used for logging and remote GUIs | |
| const Capabilities | WiiMoteInfo::capabilities (TargetName, NumReferenceFrames, outputNames, NumButtons, buttonNames, NumSensors, sensorNames, PIDJointOffset, NumPIDJoints, LEDOffset, NumLEDs, NumOutputs) |
| allocation declared in RobotInfo.cc | |
| const char *const | TentacleInfo::TargetName = "Tentacle" |
| the name of the model, to be used for logging and remote GUIs | |
| const Capabilities | TentacleInfo::capabilities (TargetName, NumReferenceFrames, outputNames, NumButtons, buttonNames, NumSensors, sensorNames, PIDJointOffset, NumPIDJoints, LEDOffset, NumLEDs, NumOutputs) |
| allocation declared in RobotInfo.cc | |
| const char * | RobotInfo::CameraName = CameraModelName |
| Name of the camera being used on the robot. | |
| fmat::Matrix< 3, 3 > | RobotInfo::CameraHomography = fmat::Matrix<3,3>::identity() |
| The camera correction homography to utilize. | |