DynamixelProtocol.h File Reference
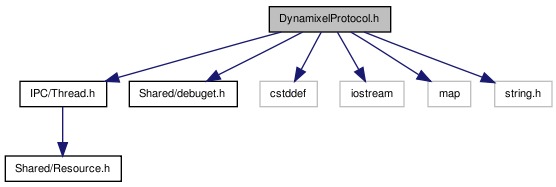
#include "IPC/Thread.h"#include "Shared/debuget.h"#include <cstddef>#include <iostream>#include <map>#include <string.h>
Include dependency graph for DynamixelProtocol.h:
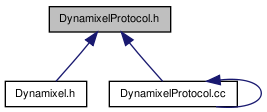
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | GenericCmdHeader |
| struct | SyncWriteHeader< T > |
| Allows you to do a "synchronized write", where all recipients commit the value(s) at the same time, and do not send any response packets. More... | |
| struct | SyncWriteEntry |
| struct | SyncWritePosSpeedEntry |
| An element that follows a SyncWriteHeader, controls position and speed. More... | |
| struct | SyncWriteContinuousRotationEntry |
| An element that follows a SyncWriteHeader, enables or disables continuous rotation mode. More... | |
| struct | SyncWriteLEDEntry |
| An element that follows a SyncWriteHeader, toggles LED value. More... | |
| struct | SyncWriteComplianceEntry |
| struct | SyncWritePunchEntry |
| struct | SyncWritePIDEntry |
| For MX series servos, not AX or RX. More... | |
| struct | SyncWriteTorqueEntry |
| struct | SyncWriteSoundHoldEntry |
| clears the sound data max hold field of an AX-S1 More... | |
| struct | SyncWriteSoundCountEntry |
| clears the sound detected count field of an AX-S1 More... | |
| struct | SyncWriteSoundHoldAndCountEntry |
| clears the sound data max hold and sound detected count fields of an AX-S1 at the same time, see ClearSoundHold and ClearSoundCount More... | |
| struct | WriteHeader |
| struct | BroadcastTorqueCmd |
| Broadcasts a 'torque enable' (or disable) command to all servos using a write command to the appropriate address. More... | |
| struct | BroadcastTorqueEntry |
| Broadcasts a 'max torque' value to all servos using a write command to the appropriate address. More... | |
| struct | BroadcastFullComplianceCmd |
| Broadcasts a command to set controller parameters to 0, also disabling torque (see also BroadcastNoPunchCmd). More... | |
| struct | BroadcastNoPunchCmd |
| Sets 'punch' parameter to 0, eliminating torque jump (see also BroadcastFullComplianceCmd). More... | |
| struct | BroadcastZeroSpeedCmd |
| Sets 'speed' parameter to 0, ensuring no motion will occur from leftover 'free spin' commands. More... | |
| struct | BroadcastBaudCmd |
| Sets 'baud rate' parameter to the specified value, where resulting bits per second will be 2M / (baud+1). More... | |
| struct | SetReturnDelayTimeCmd |
| Sets 'return delay time' parameter to the specified value, where actual delay time is 2µs * value. More... | |
| struct | SetStatusResponseLevelCmd |
| Sets 'status response level' parameter to the specified value, see StatusResponseLevel. More... | |
| struct | SetServoIDCmd |
| Sends a command to change a servo's ID value (use carefully!). More... | |
| struct | SetPosSpeedCmd |
| Sets the position and speed for a single servo. More... | |
| struct | ClearSoundHoldCmd |
| clears the sound data max hold field of an AX-S1 More... | |
| struct | ClearSoundCountCmd |
| clears the sound detected count field of an AX-S1 More... | |
| struct | ClearSoundHoldAndCountCmd |
| clears the sound data max hold and sound detected count fields of an AX-S1 at the same time, see ClearSoundHold and ClearSoundCount More... | |
| struct | GenericResponseHeader |
| contains fields global to all response packets More... | |
| struct | WriteResponse |
| Expected response from a Write command (when sent to non-broadcast address). More... | |
| struct | ServoSensorsResponse |
| Expected response from a ReadServoSensorsCmd, common across AX, RX, and EX series at least. More... | |
| struct | AXS1SensorsResponse |
| Expected response from a ReadAXS1SensorsCmd. More... | |
| struct | TorqueResponse |
| Expected response from a ReadTorqueCmd. More... | |
| struct | ServoInfoResponse |
| Expected response from a ReadModelCmd. More... | |
| struct | ReadCmd |
| Contains fields which are global to all read commands, which can read a block of parameters from the unit. More... | |
| struct | ReadServoSensorsCmd |
| Requests a block of servo sensor values be sent, servo should respond with a ServoSensorsResponse. More... | |
| struct | ReadAXS1SensorsCmd |
| Requests a block of AX-S1 sensor values be sent, module should respond with a AXS1SensorsResponse. More... | |
| struct | ReadTorqueCmd |
| Requests the 'torque enable' status be sent, servo should respond with a TorqueResponse. More... | |
| struct | ReadModelCmd |
| Requests the 'model number' be sent, servo should respond with a ServoInfoResponse. More... | |
| class | PingThread |
| Attempts to ping the specified servo by reading its model number, and if successful, current sensor values. More... | |
Namespaces | |
| namespace | DynamixelProtocol |
Contains structures which define the layout of the binary communication with Dynamixel servos. | |
Defines | |
| #define | IS_MXEX(m) (m==MODEL_MX28 || m==MODEL_MX64 || m==MODEL_MX106 || m==MODEL_EX106P) |
Enumerations | |
| enum | ModelID_t { MODEL_DX113 = 113, MODEL_DX116 = 116, MODEL_DX117 = 117, MODEL_AX12 = 12, MODEL_AX18 = 18, MODEL_AXS1 = 13, MODEL_RX10 = 10, MODEL_RX24 = 24, MODEL_RX28 = 28, MODEL_RX64 = 64, MODEL_MX28 = 29, MODEL_MX64 = 310, MODEL_MX106 = 320, MODEL_EX106P = 107, MODEL_UNKNOWN = static_cast<size_t>(1<<16) } |
| enum | StatusResponseLevel { RESPOND_NONE = 0, RESPOND_READ = 1, RESPOND_ALL = 2 } |
symbol names for status response level settings, see SetStatusResponseLevelCmd More... | |
| enum | ResponseError_t { VOLTAGE_ERROR = 1, ANGLE_ERROR = 2, HEAT_ERROR = 4, RANGE_ERROR = 8, CHECKSUM_ERROR = 16, LOAD_ERROR = 32, INSTRUCTION_ERROR = 64 } |
Provides bitmasks for checking various error conditions in GenericResponseHeader::error. More... | |
Functions | |
| unsigned char | nchecksum (const unsigned char *p, size_t len, size_t off=0) |
| Compute a bitwise-negated checksum for a region of memory, with an optional offset. | |
| unsigned char | nchecksum (const struct GenericCmdHeader &p, size_t len) |
| 'specialization' of nchecksum for the GenericCmdHeader, which should skip marker fields | |
| unsigned char | nchecksum (const struct GenericResponseHeader &p, size_t len) |
| 'specialization' of nchecksum for the GenericResponseHeader, which should skip marker fields | |
| template<class T > | |
| void | updateChecksum (T &cmd) |
| updates the checksum field of the specified structure, call this for a structure after you modify its fields | |
| template<class T > | |
| bool | validate (const T &msg) |
| returns true if markers and checksum are valid | |
| void | reportErrors (unsigned int servoID, unsigned int offset, unsigned char err) |
| template<class R > | |
| bool | readResponse (std::istream &is, R &response, unsigned int offset) |
| reads a response from an input stream, attempts to handle line noise before response | |
| template<class T > | |
| std::ostream & | write (std::ostream &os, const T &cmd) |
| writes a command into a stream, returning the stream for convenient ostream::flush call. | |
| template<class T > | |
| std::ostream & | write (std::ostream &os, const T &cmd, unsigned char &checksum) |
| writes a command into a stream and incrementing a checksum, returning the stream for convenient ostream::flush call. Remember to bitwise-not (~) the checksum before transmission! | |
Variables | |
| const unsigned int | MAX_ID = 0xFD |
| const unsigned int | BROADCAST_ID = 0xFE |
| const unsigned int | INVALID_ID = 0xFF |
| const unsigned int | MARKER_VALUE = 0xFF |
| const std::map < DynamixelProtocol::ModelID_t, const std::string > | dynamixelModels |
| maps model numbers (e.g. from a ServoInfoResponse) to human-readable names | |
| const unsigned char | RESPONSE_HEADER_LEN = sizeof(GenericResponseHeader)+1 |
Detailed Description
Definition in file DynamixelProtocol.h.
Define Documentation
| #define IS_MXEX | ( | m | ) | (m==MODEL_MX28 || m==MODEL_MX64 || m==MODEL_MX106 || m==MODEL_EX106P) |
Definition at line 12 of file DynamixelProtocol.h.
Referenced by ServoInfo::initEntries().